

Home Crumble Crumbs cocodrilos

CR-SG90
Crumb servo SG90
Los Crumbs son módulos compatibles con el controlador Crumble que se conectan mediante cables con pinzas de cocodrilos.
Este crumb consiste en un micro servo analógico tipo SG90 para Crumble.
¿Qué es un servo?
Un servo es un dispositivo compuesto por un motor en el que, en lugar de definir la potencia con la que gira, indicamos la posición de su eje en un rango limitado de grados. Los servos más habituales poseen un rango de movimiento de 0 a 180 grados.
Un Crumb servo SG90 es un módulo diseñado para usar con Crumble (Crumb) compuesto por un microservo de 9g de 180 grados unido a un Crumbliser que facilita sus conexiones mediante cables de cocodrilo.
¿Cómo conectar un Crumb servo SG90?
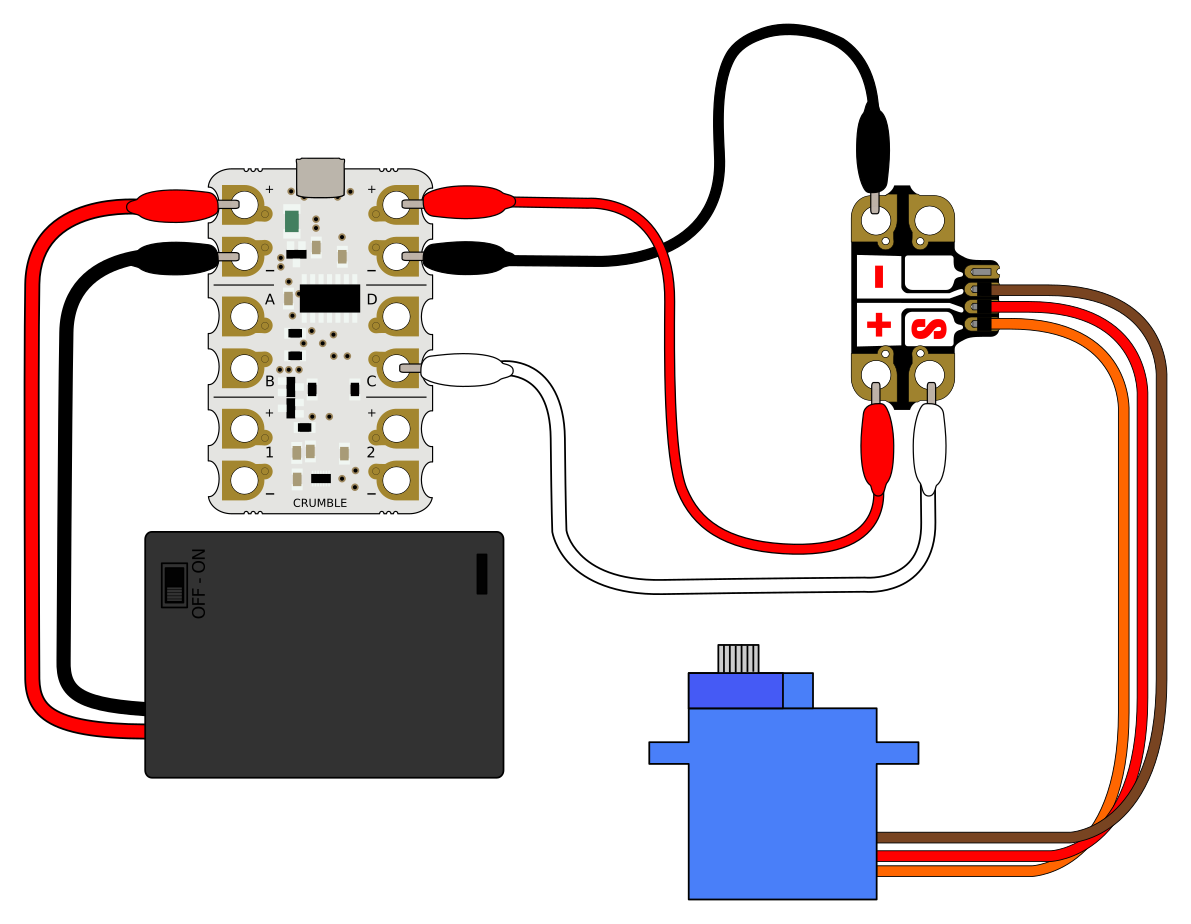
Para conectar este crumb solo es necesario conectar la alimentación positiva y negativa de Crumble a los pines con símbolos + y - y el puerto S (señal) al puerto del controlador que queramos utilizar para controlarlo (el puerto C en este caso).
¿Cómo programar un servo?
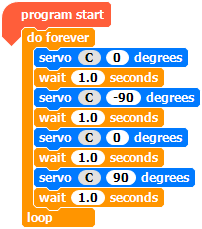
El control de servos de 180 grados utiliza su propio bloque que se encuentra en el apartado Input/Output del software de Crumble. En él solo es necesario indicar el puerto al que lo hemos conectado y la posición (de -90 a 90) que queramos dar a nuestro servo.
En este programa hemos definido que el servo pase continuamente por las posiciones extremas (-90 y 90) y el punto medio (0) cada segundo. Este programa se repetirá continuamente porque hemos incluido un bucle infinito.
Recuerda activar el interruptor del portapilas cuando quieras encender cualquier actuador.
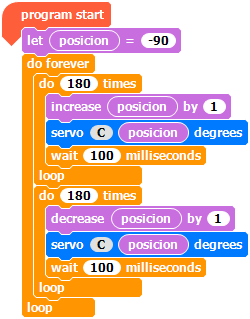
Aunque los servos no permiten definir la velocidad a la que desplazarse podemos programar el tiempo que pasa entre una posición y otra. Si estas posiciones están cerca podremos hacer que se desplace más rápido o despacio incluyendo una pequeña espera antes de pasar a la siguiente.
En este programa hemos utilizado una variable que contará de -90 a 90 de uno en uno, indicará esa posición al servo y esperará 100 milisegundos en esa posición. Modificando esta espera haremos que la pala del servo avance más rápido o más despacio.
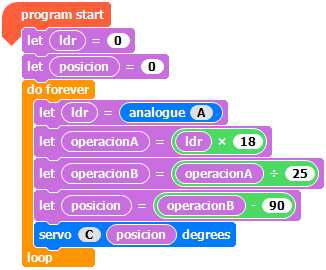
También podemos definir la posición de un servo a partir de la lectura de un sensor analógico. En este ejercicio hemos conectado una LDR al puerto A (recuerda cómo conectarla en esta página) y un servo al puerto C. En el programa leemos el valor recibido en el puerto A y operamos con él para convertirlo de un rango de 0 a 255 valores a uno de -90 a 90 compatible con el servo.
De esta manera controlaremos la posición del servo cubriendo o destapando la LDR.
Descargas
Productos relacionados

- Crumble Cocodrilos 1 - Luces y movimiento
- 5,50 €4.00% IVA incluido

- Crumble cocodrilos 2 Sensores digitales y funciones lógicas
- 5,50 €4.00% IVA incluido

- Crumble cocodrilos 3 Sensores analógicos, variables y operaciones matemáticas
- 5,50 €4.00% IVA incluido

- Kit expansión Crumble Cocodrilos
- 78,65 €21.00% IVA incluido

