

KIT-DODO-LITE
Kit Robot Dodo Lite
Kit de robot educativo con Raspberry Pi Pico
Basado en la placa Dodo Lite
Incluye gran cantidad de sensores y actuadores
Ideal para programar en Phyton
Índice de contenidos de la documentación del Kit Robot Dodo Lite:
- Antes de empezar
- Descripción
- Contenido del kit
- Placa Dodo Lite
- Montaje del robot
- Thonny: el entorno de programación con MicroPython
- Programación con Python y Raspberry Pi Pico
1. Antes de empezar
Este kit permite montar un robot que está diseñado para programarse en Python con gran facilidad gracias a la amplia librería que hemos desarrollado a tal efecto.
A pesar de su aparente sencillez, este robot permite trabajar aspectos complejos de la programación y el control, una característica que le hace especialmente indicado para su uso educativo de 4º ESO a 2 Bach. Si estas buscando un robot con programación sencilla por bloques te recomendamosque uses otros robots basados en tecnología Crumble, como el MiiBot o el Bilby.
Atención: es muy importante seguir el proceso de montaje con cuidado y precisión. De realizarse de forma incorrecta el robot podrá resultar dañado de forma irreversible. Los daños producidos por un uso o montaje incorrecto del robot no están cubiertos por la garantía.
2. Descripción
El kit del robot educativo Dodo Lite es un producto Complubot, de fabricación propia, que aúna la robustez mecánica, un gran número de sensores y actuadores y la potencia del controlador Raspberry Pi Pico.
3. Contenido del kit
Este kit se suministra en una caja contenedora que contiene todo el material y que también puede servir para guardar el robot una vez montado. En este caso hay que desconectar el módulo Bluetooth.

Dentro de la caja contenedora del kit podemos encontrar los siguientes elementos:

- Un chasis metálico
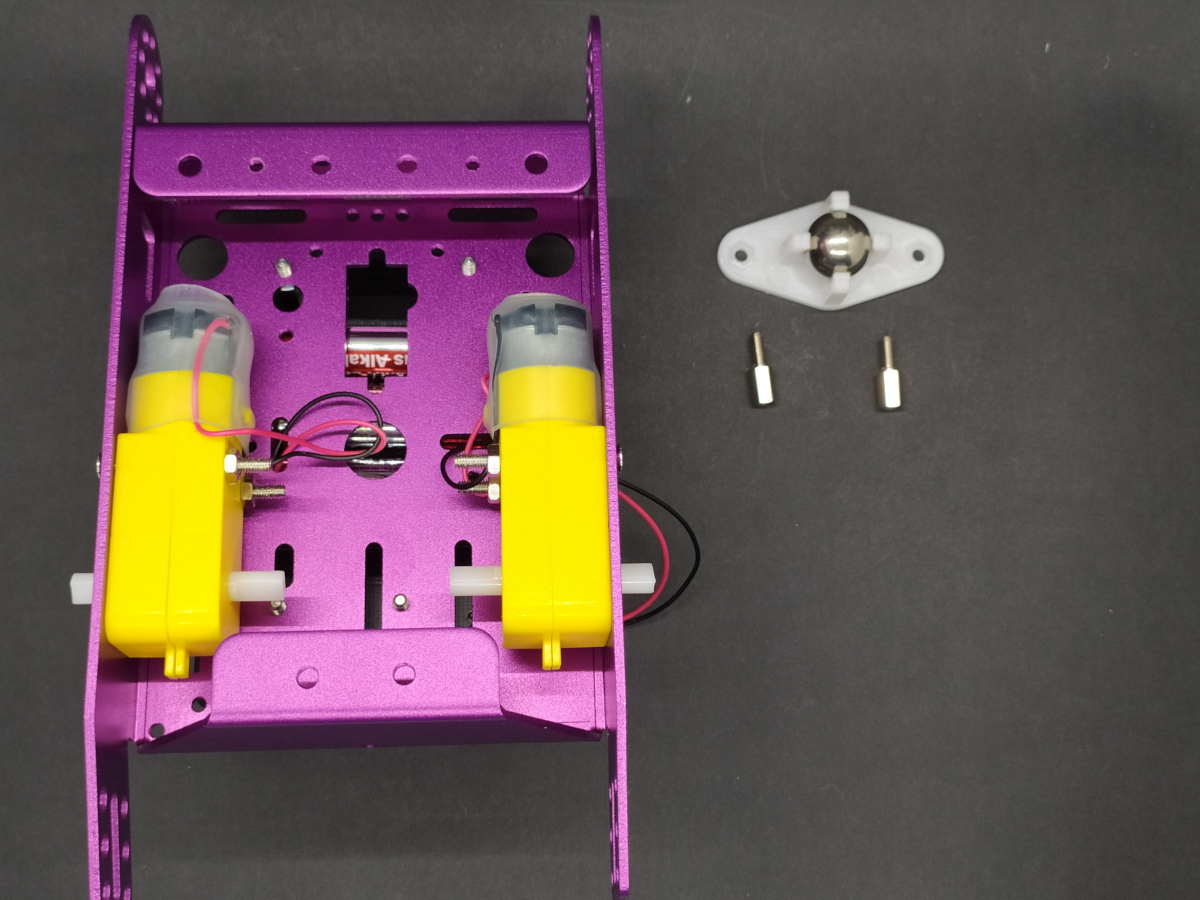
- Una rueda loca
- Dos motores de 140 rpm@6V
- Dos ruedas motrices de 65mm de diámetro
- Una placa Dodo Lite
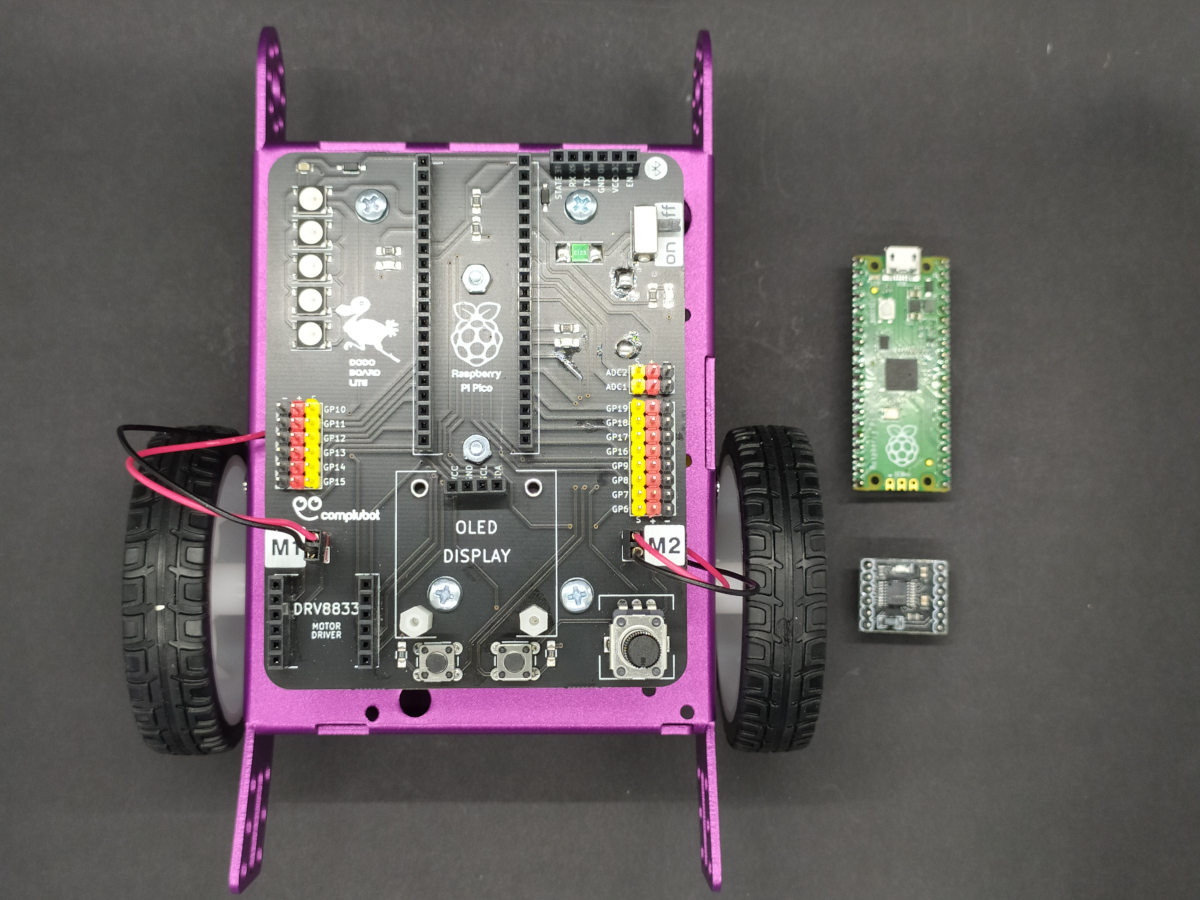
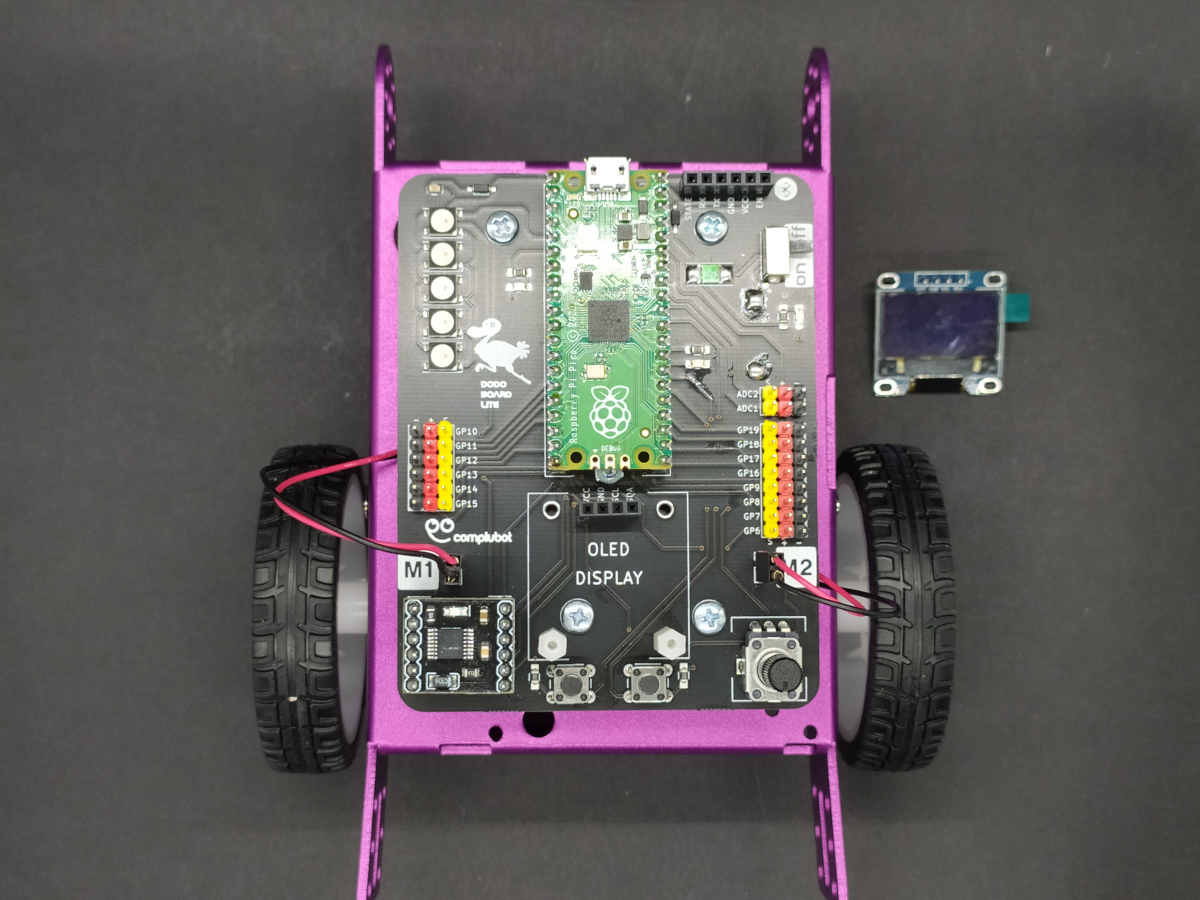
- Una placa controladora Raspberry Pi Pico
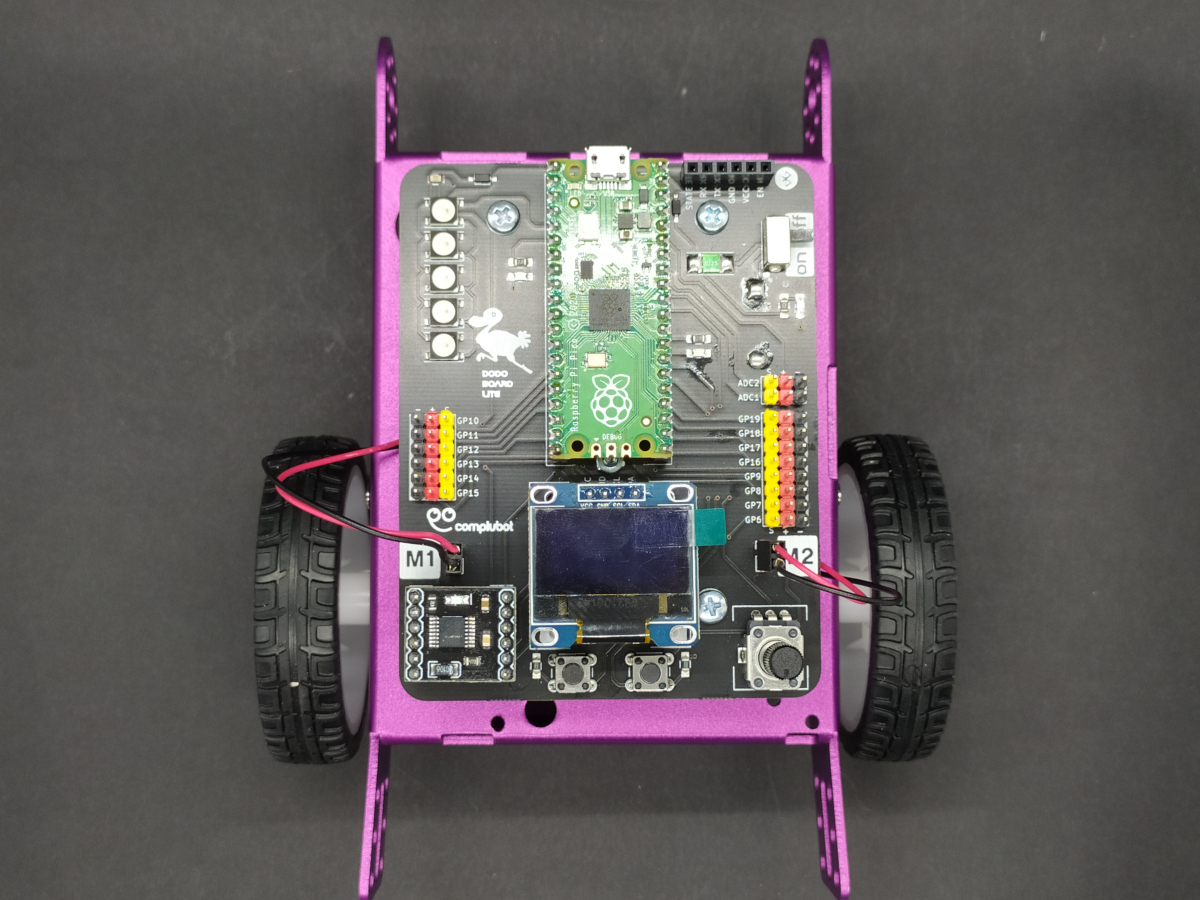
- Un display OLED gráfico de 128 x 64 pixels
- Un Driver de control de motores DRV 8833
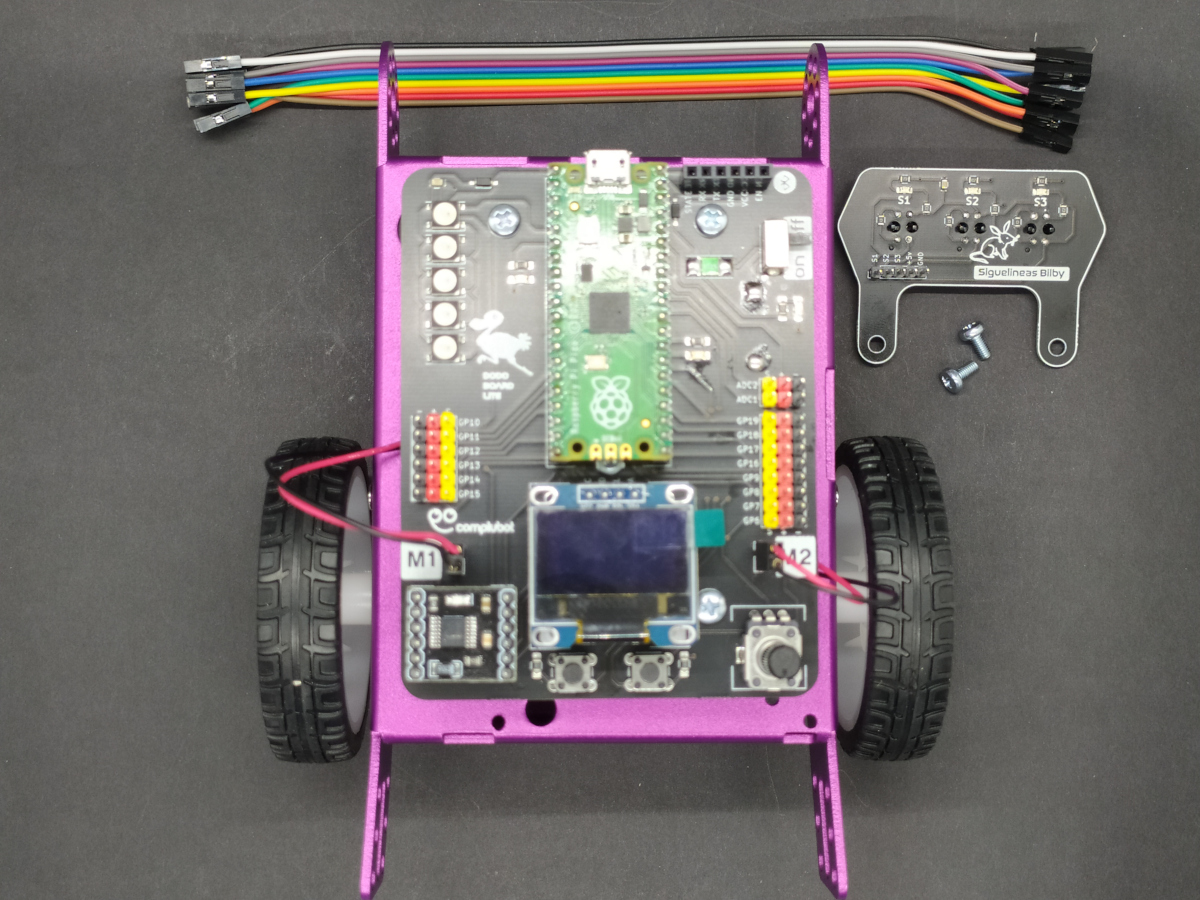
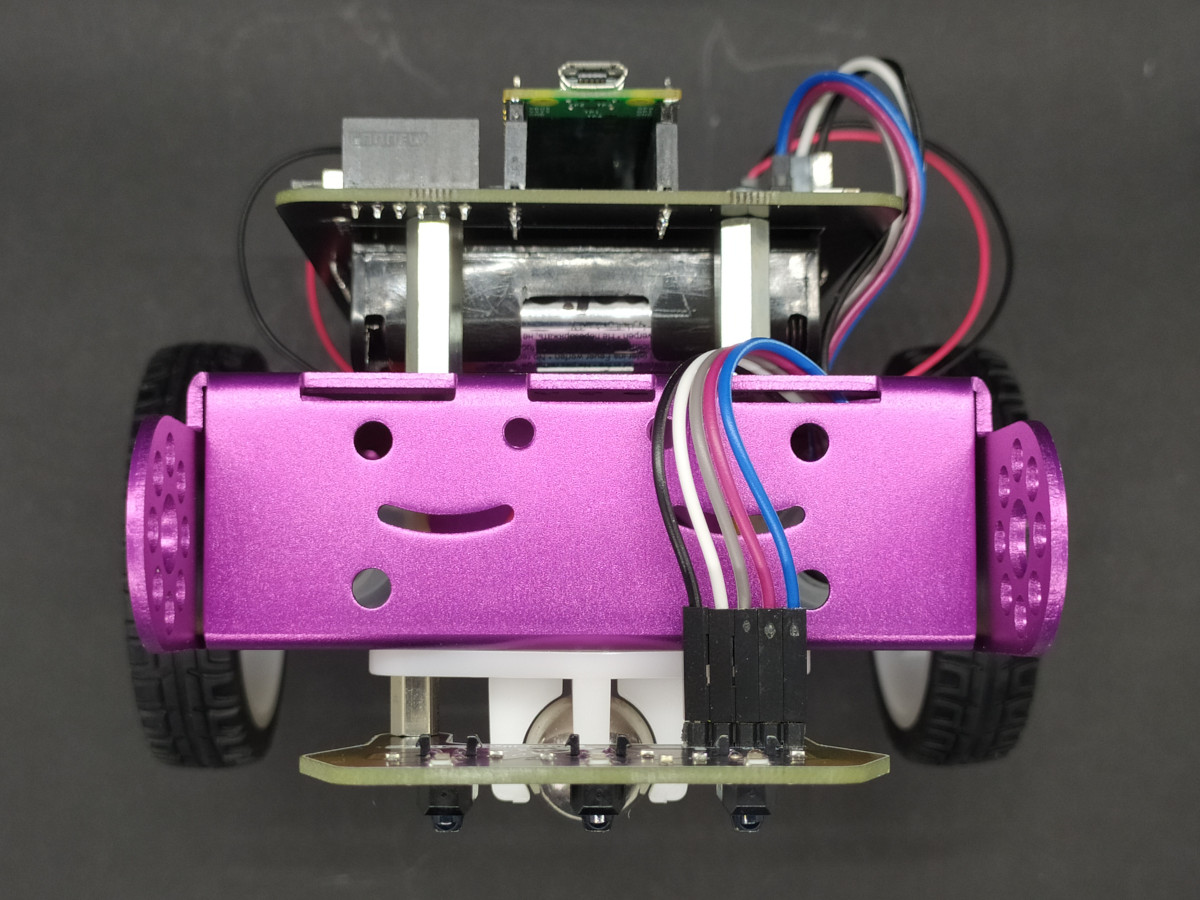
- Un módulo sigue líneas de tres elementos activos (Bilby)
- Un módulo medidor de distancia por ultrasonidos (Bilby)
- Cables de conexiones:
- 1 cable de conexión Molex-Header de 150mm
- 3 cables de conexión Molex-Header de 200mm
- Un cable micro USB
- Un destornillador PH1 (todos los tornillos de este kit tienen cabeza PH1)
- Tornillería y separadores
- 8 tornillos M3x6mm con cabeza alomada
- 4 tornillos M3x30mm con cabeza alomada
- 2 tornillos M2x6mm con cabeza alomada
- 4 tuercas M3
- 2 saparadores (H-H) nylon M2x12mm
- 2 separadores (M-H) metélicos M3x8mm
- 4 separadores (H-H) metálicos M3x25mm
- 4 arandelas M3
Todos los elementos que así lo requieran se suministran soldados y listo para su uso. No es necesario usar el soldador ni ninguna otra herramienta, más allá de un simple destornillador de estrella, para completar el montaje de este robot.
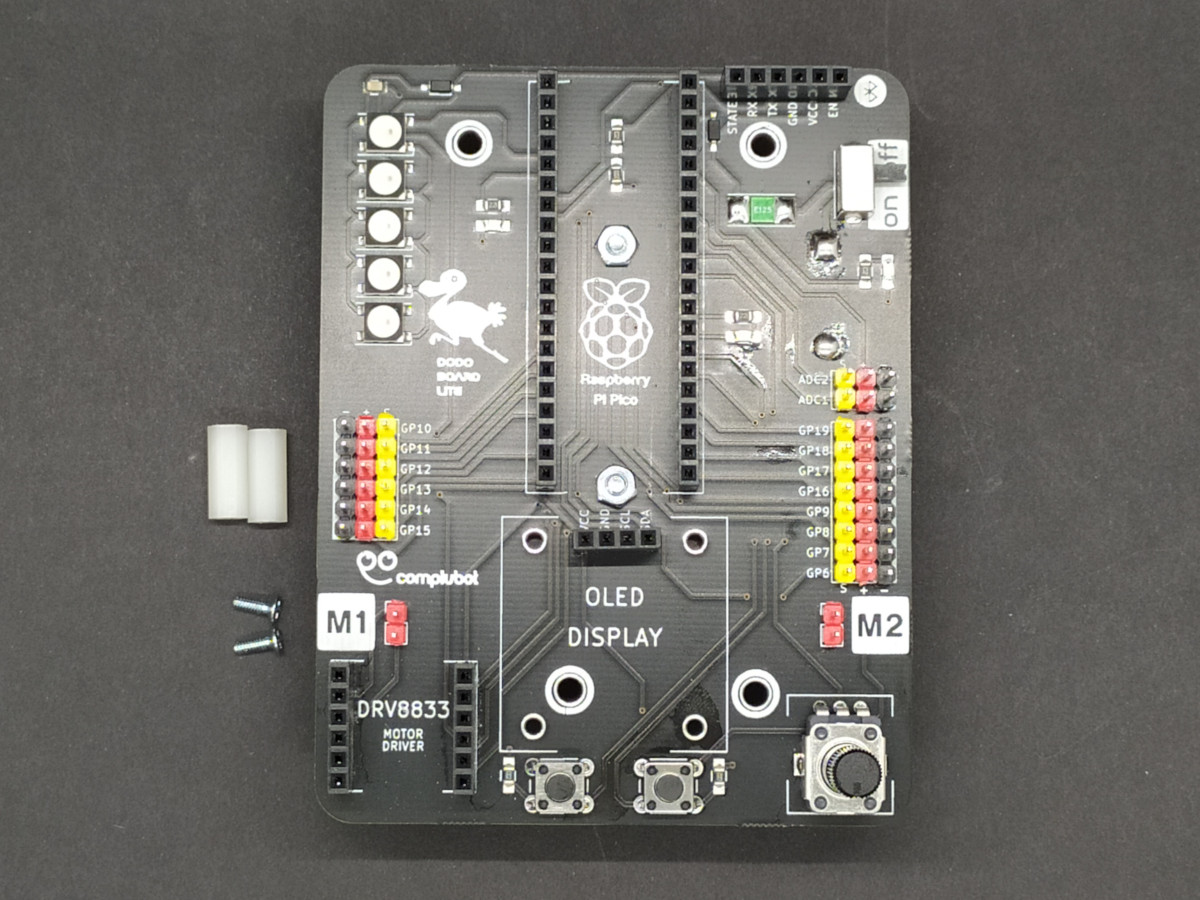
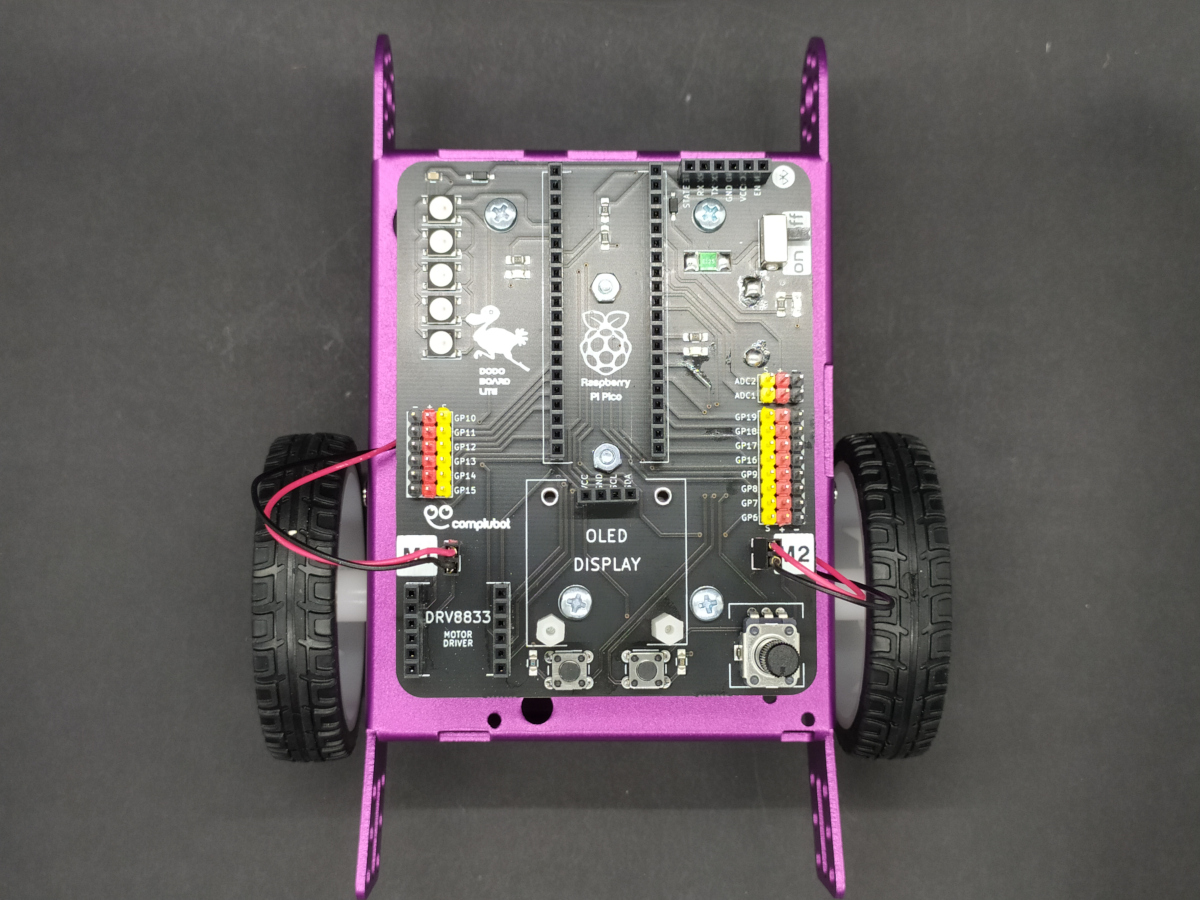
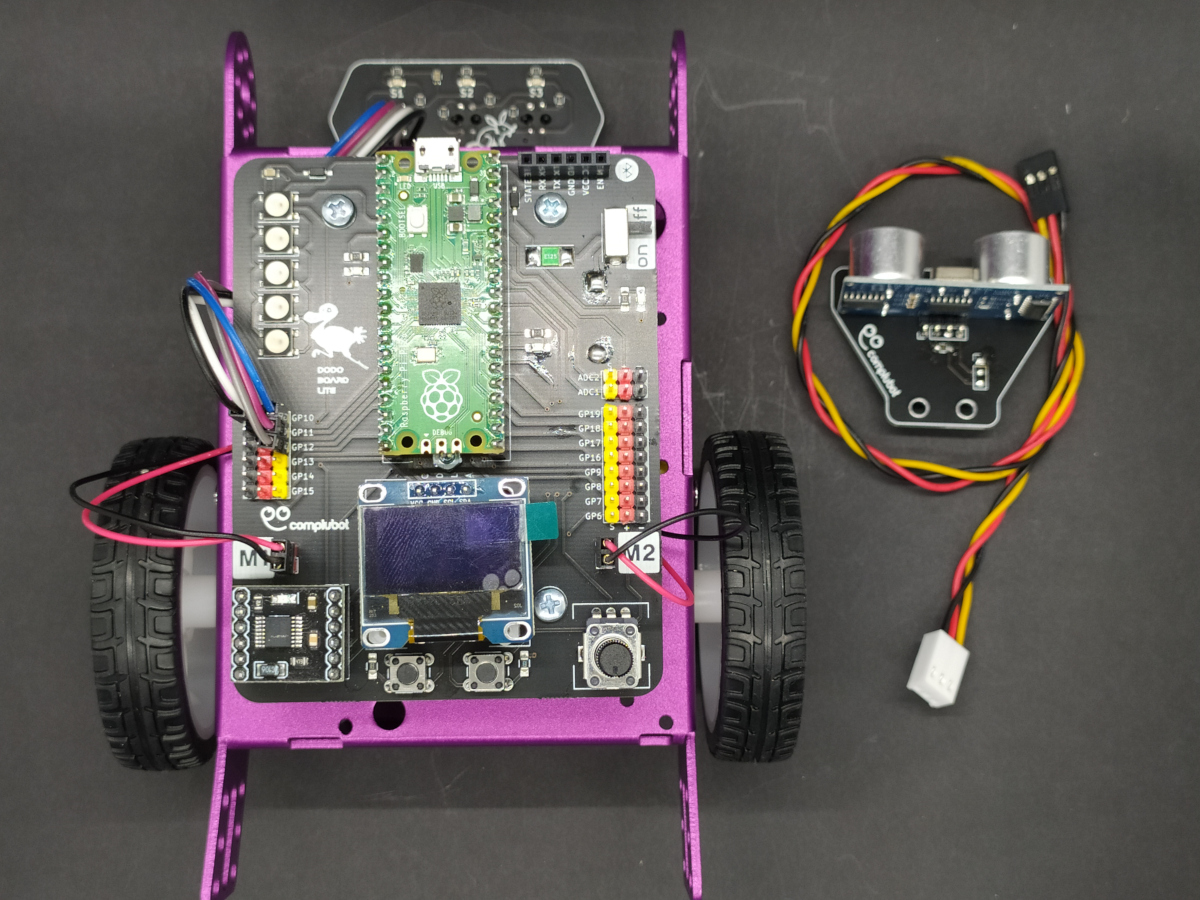
4. Placa Dodo Lite
La placa Dodo Lite es una versión reducida de la placa Dodo de Complubot. La principal diferencia es que mientras que la placa Dodo puede controlar robots de hasta cuatro ruedas (una plataforma Mecanum, por ejemplo), La controladora Dodo Lite está diseñada para robots con plataforma diferencial: dos ruedas motrices y un punto de apoyo.
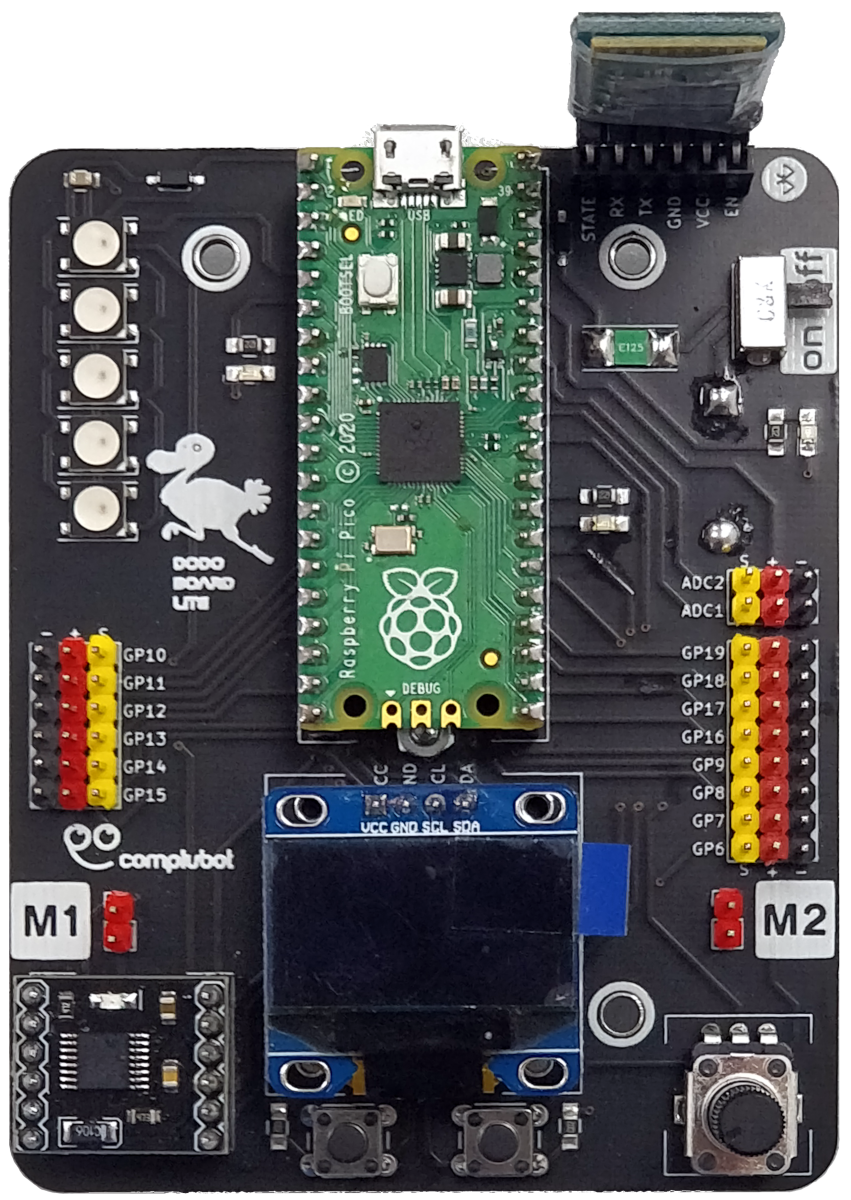
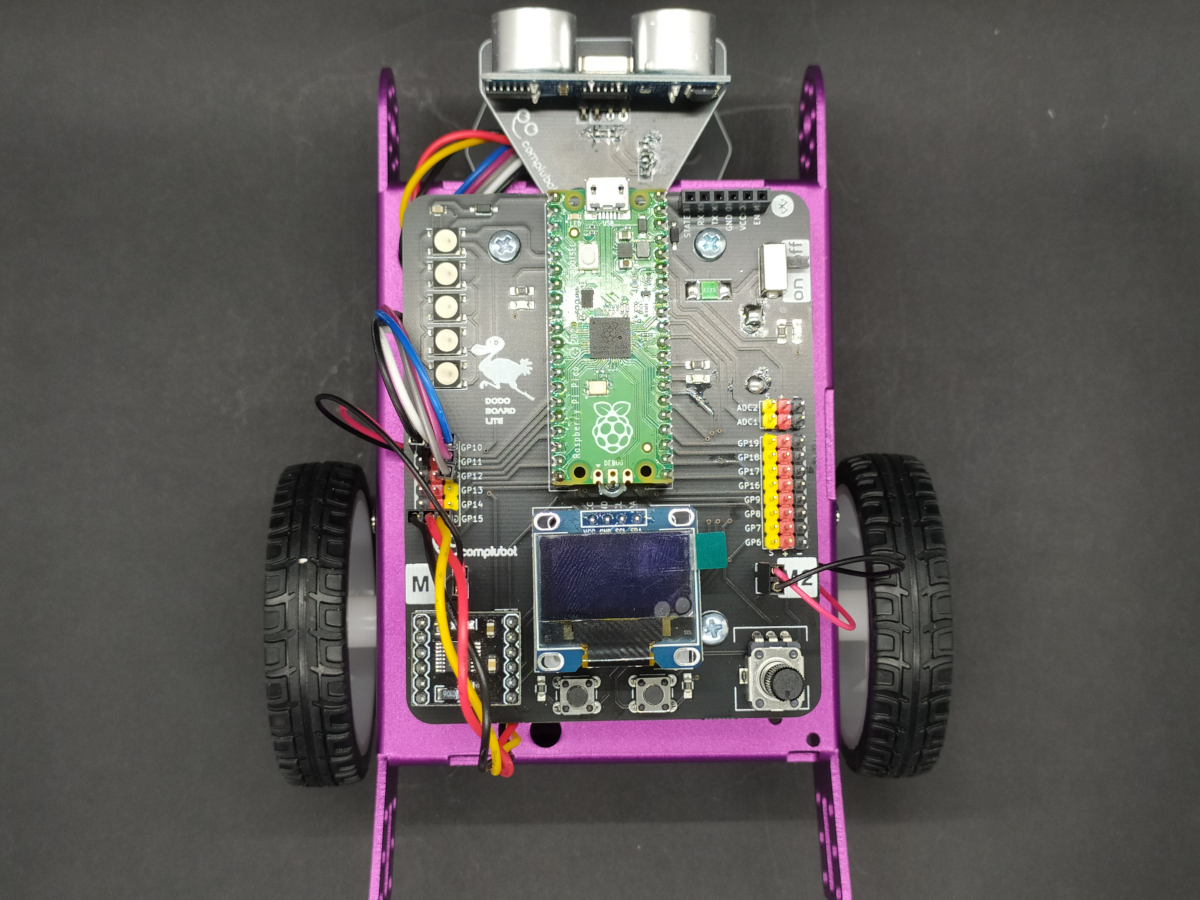
Esta placa ha sido diseñada para facilitar el uso y la aplicación robótica de la controladora Raspberry Pi Pico. En ella podemos encontrar los siguientes elementos:
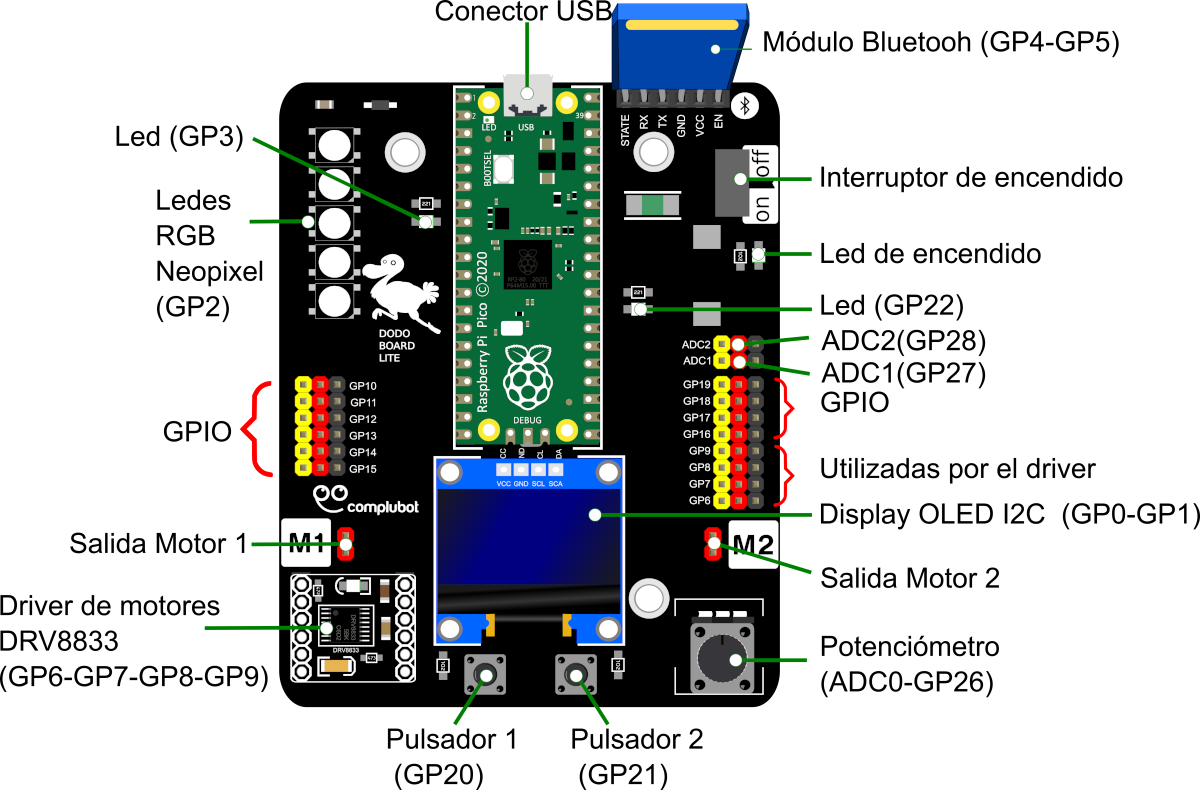
En esta imagén se muestra como referencia la conexión del módulo de comunicaciones Bluetooth HC-05, Este es un accesorio que se compra de forma independiente y que no está incluido en el contenido de este kit.
5. Montaje del robot
A continuación se muestran los pasos a seguir para conseguir el montaje del robot.
Atención: es muy importante seguir el proceso de montaje con cuidado y precisión. De realizarse de forma incorrecta el robot podrá resultar dañado de forma irreversible. Los daños producidos por un uso o montaje incorrecto del robot no está cubiertos por la garantía.
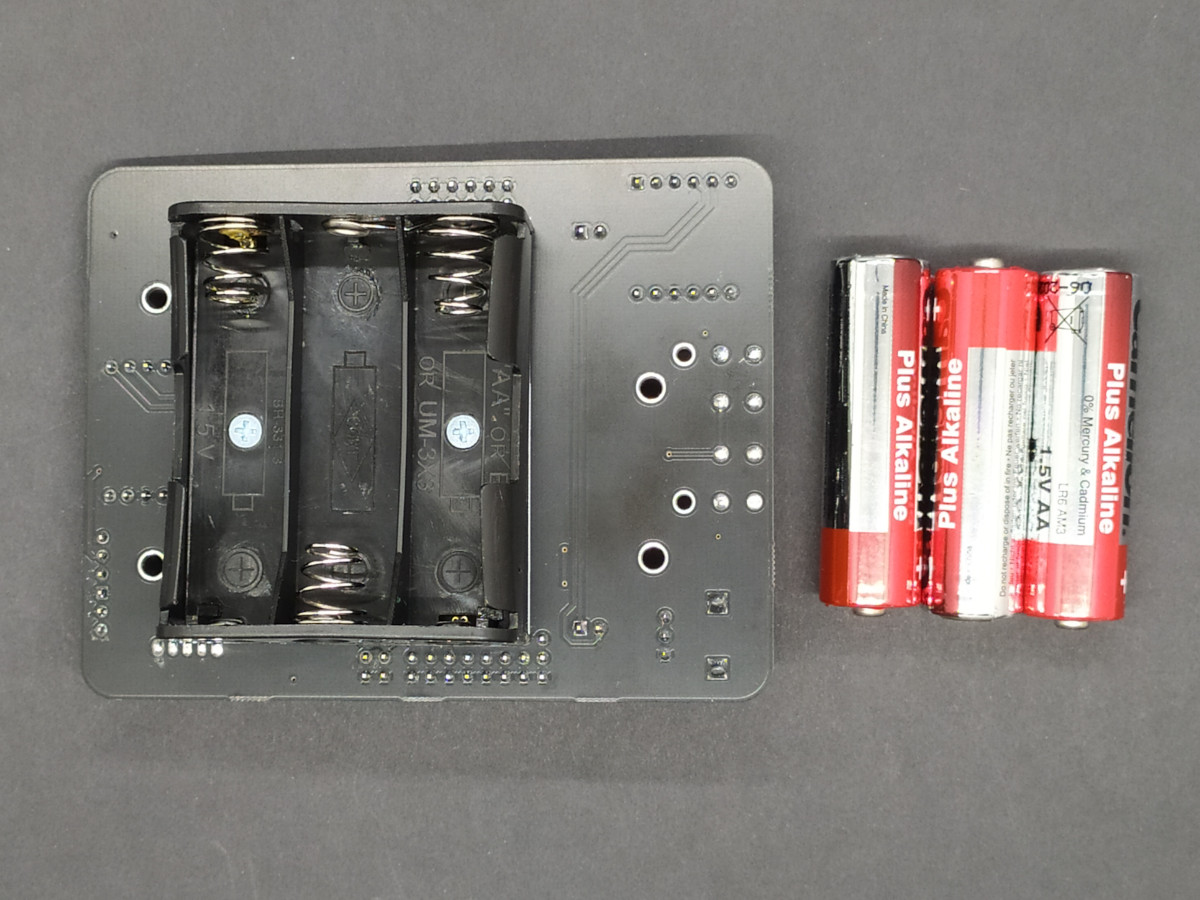
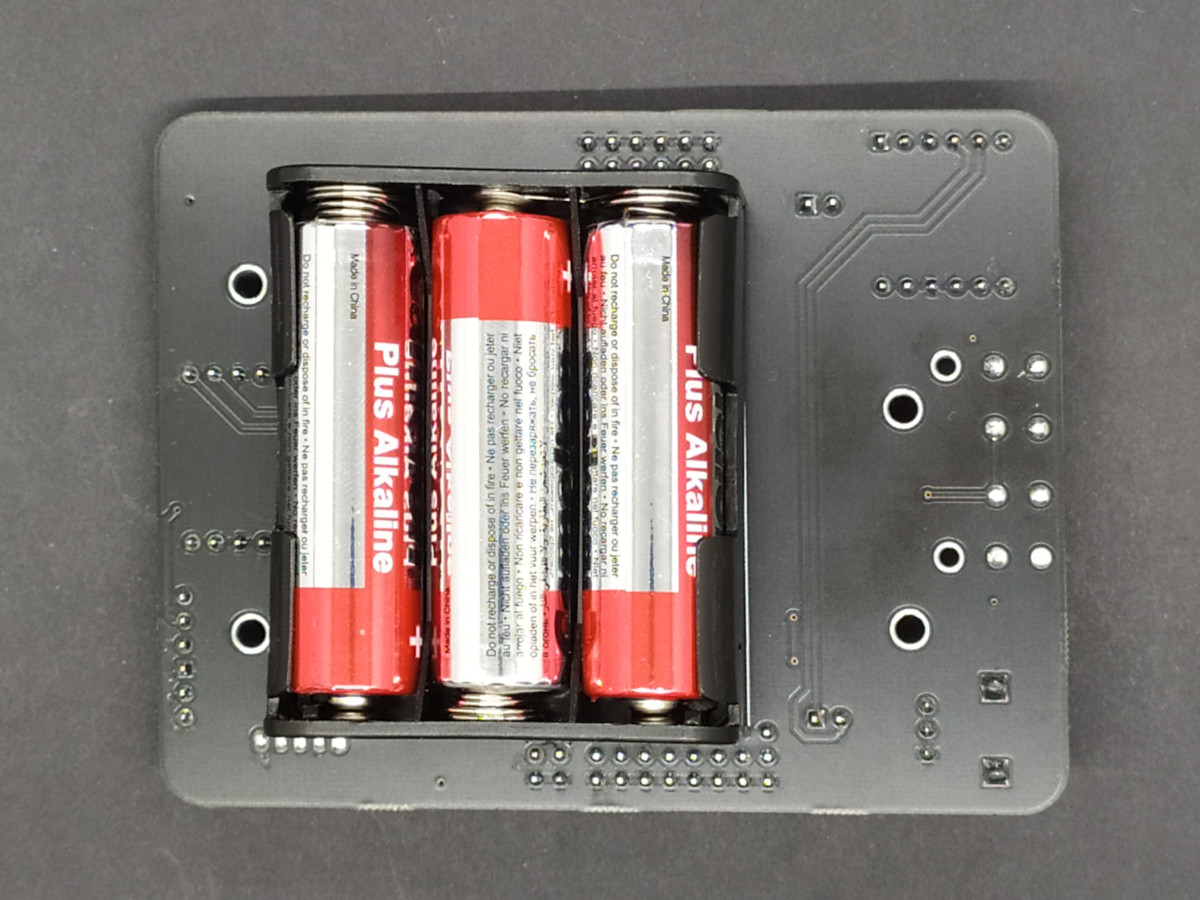
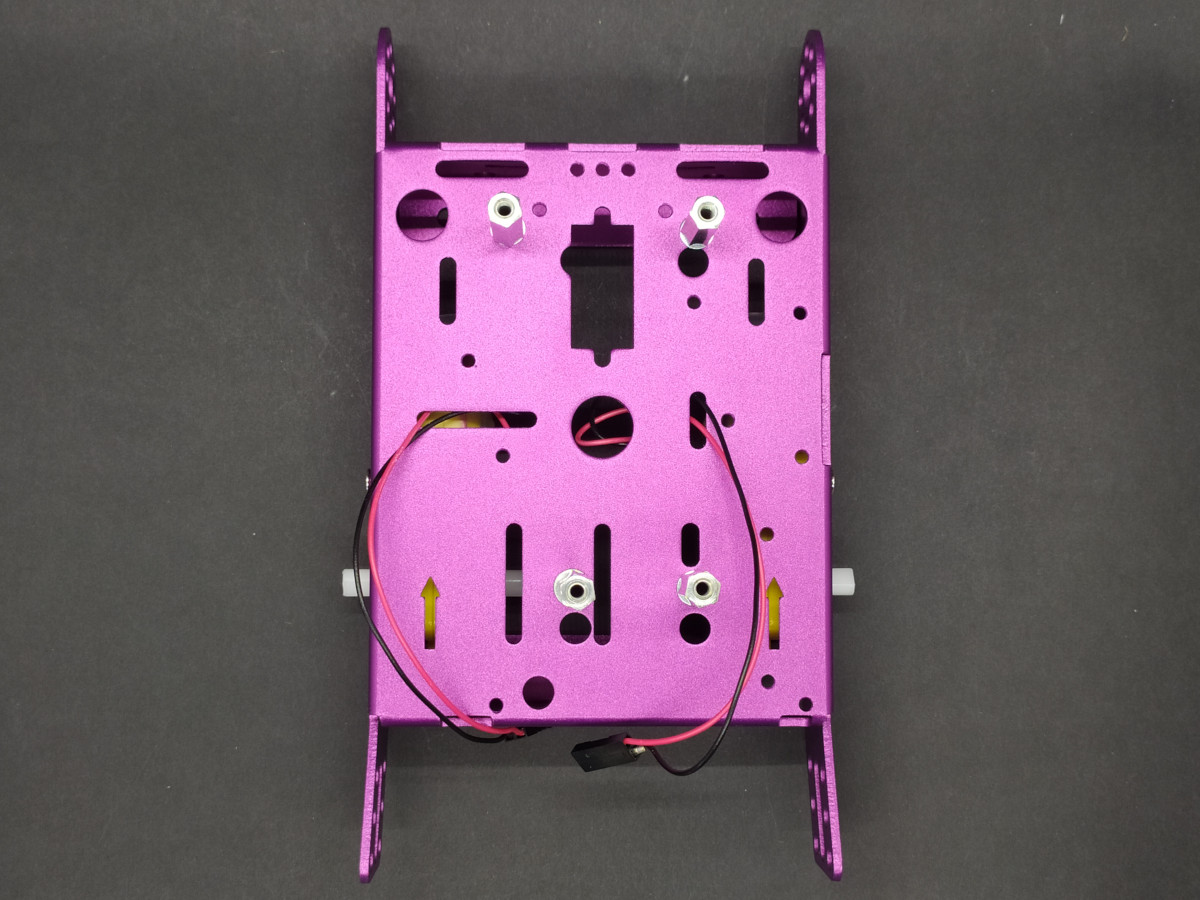
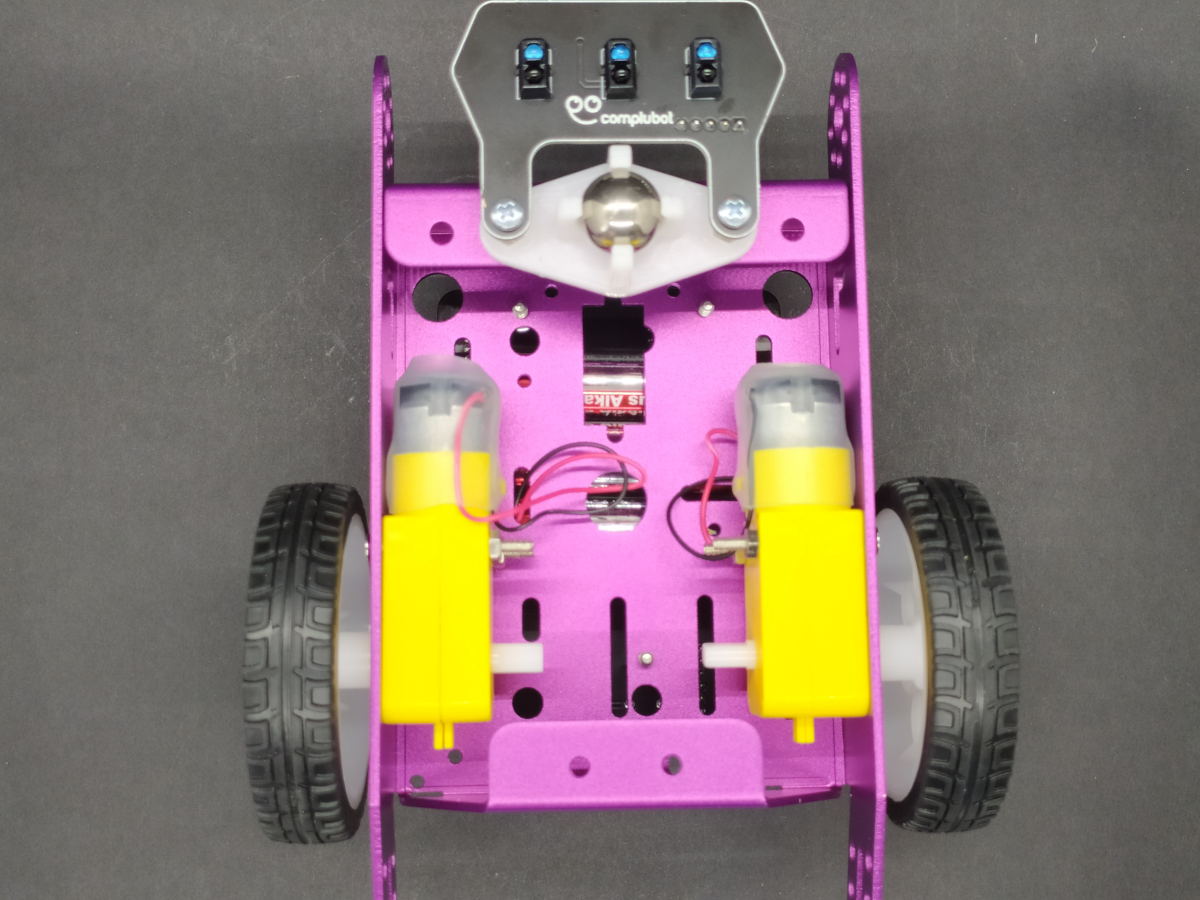
5.1 Colocación de las pilas
Este robot funciona con tres pilas alcalinas de 1,5V que suministran 4,5V en total para su funcionamiento. También puede operar con baterías recargables de NiMh, aunque con un rendimiento mucho menor ya que este tipo de baterías recargables proporcionan un voltaje menor (1,2V) por elemento.
En este promer paso colocamos el interruptor de encendido en la posición “OFF” e insertamos las tres pilas alcalinas de 1,5V en el portapilas, respetando la polaridad en todo momento.
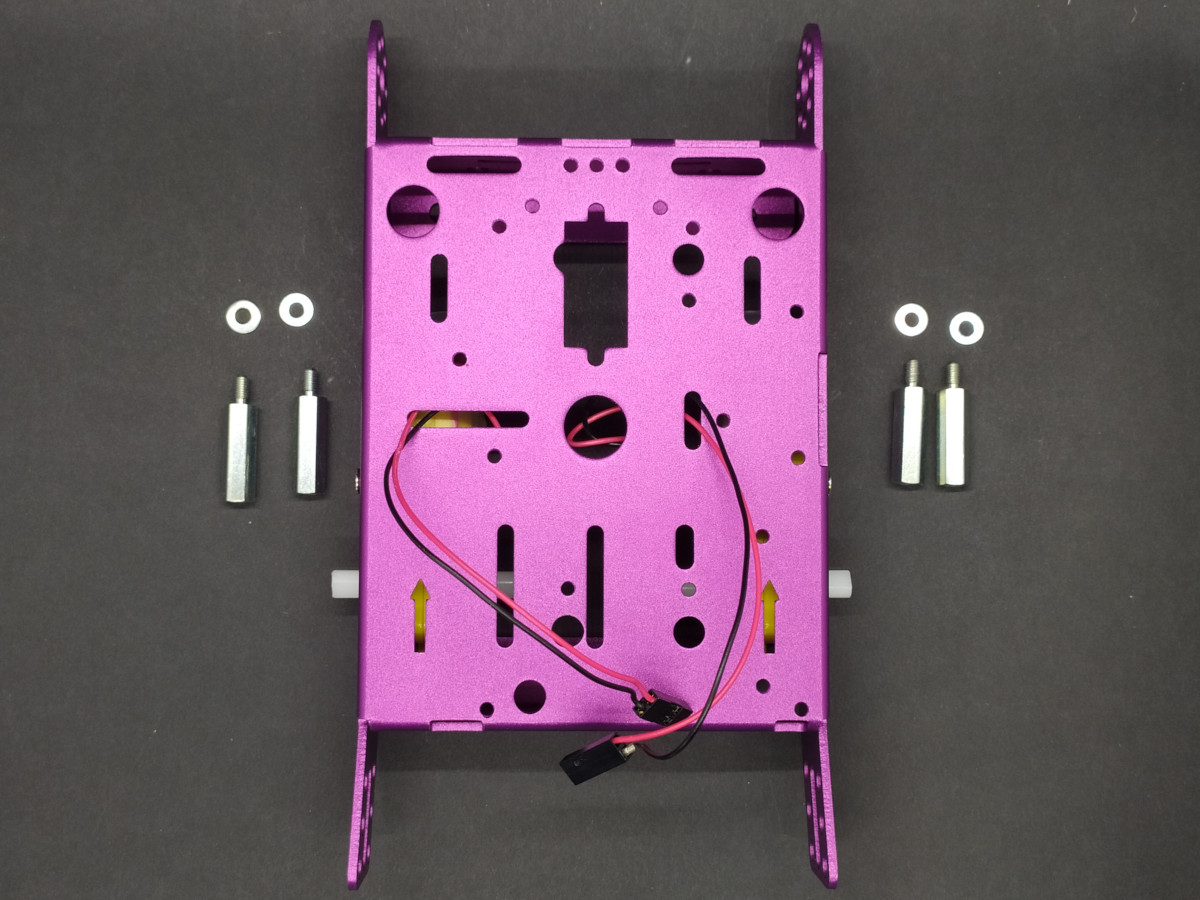
5.2 soportes del display

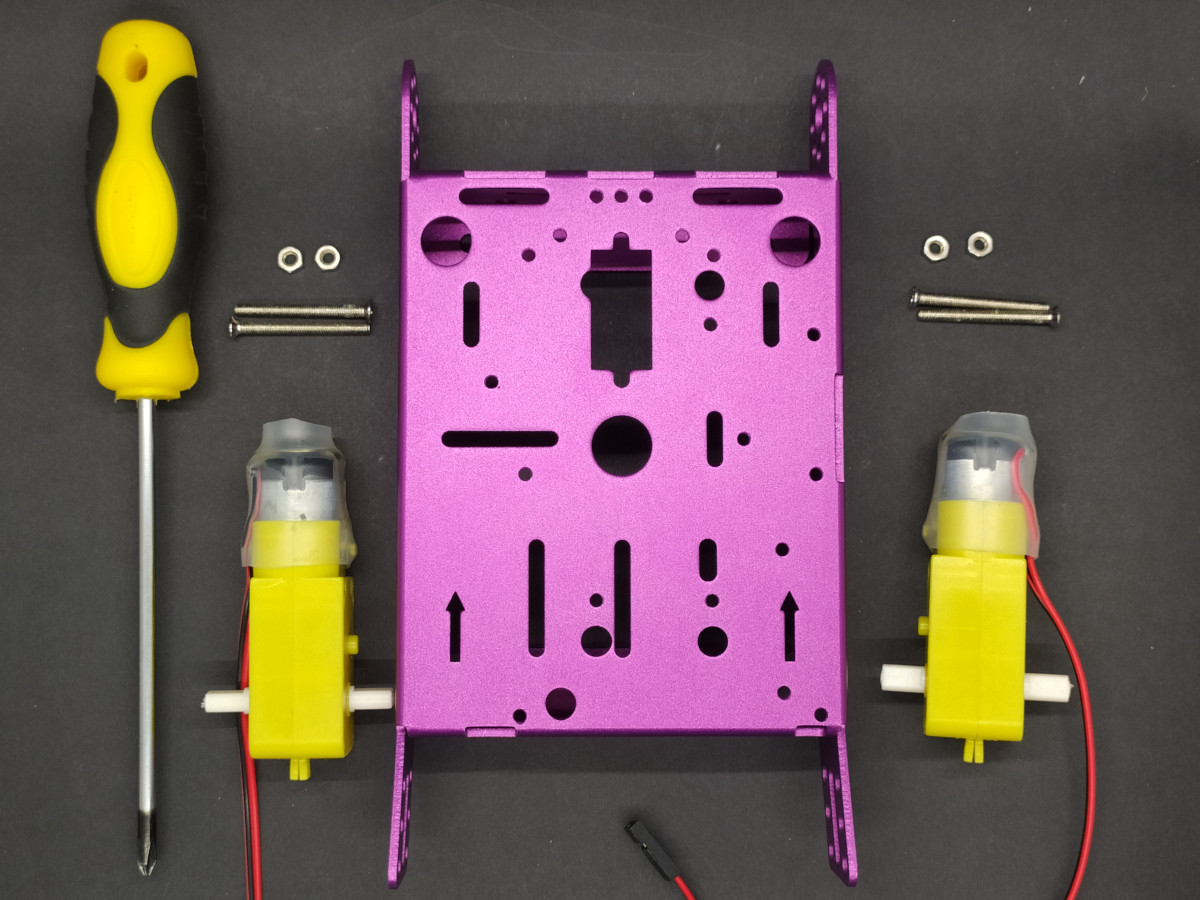
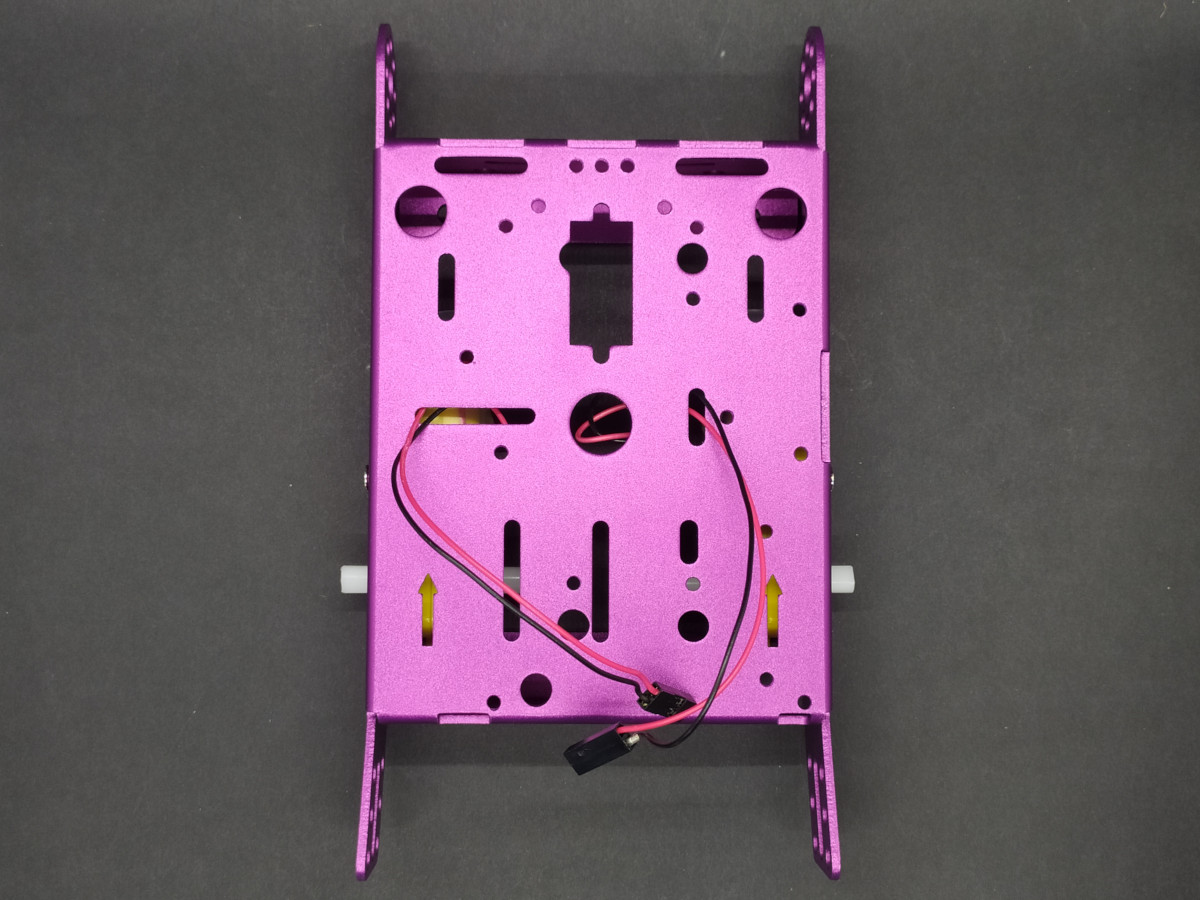
5.3 Sujeción de los motores

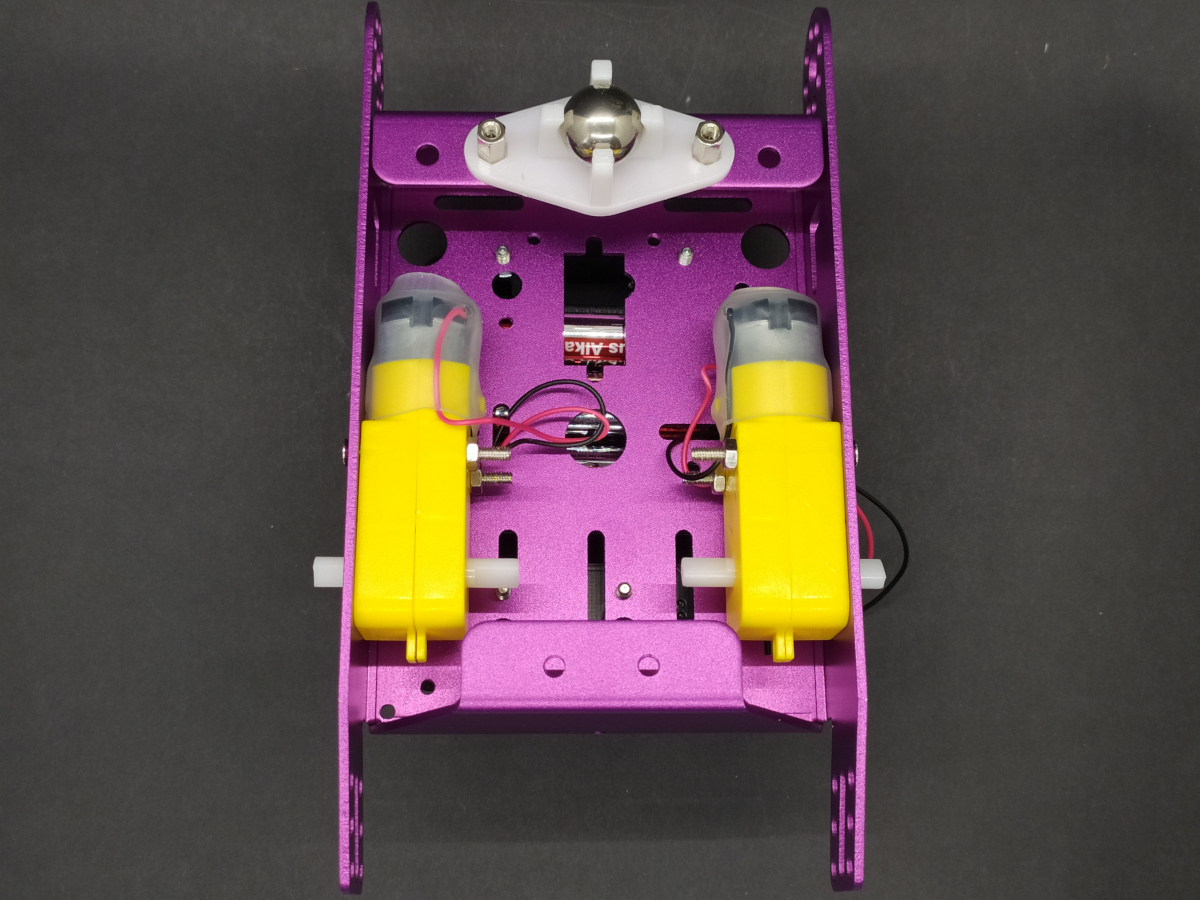


6. Thonny: el entorno de programación con MicroPython
Hay muchas formas de programar una Raspberry Pi Pico: directamente en lenguaje C, desde el Ide de Arduino, mediante bloques, con CircuitPython o con MicroPython. De todas ellas la que más interesante nos parece en la actualidad es MicroPython y en especial desde el IDE Thonny.
Para sacarle el mayor partido a la Raspberry Pi Pico desde Complubot recomendamos programarla en Python.
MicroPython es una versión simplificada de Python 3 que está especialmente diseñada para funcionar en sistemas basados en microcontrolador, como es este caso.
Así pues, con MicroPython usamos la sintaxis de Python y la mayoría de sus recursos de una forma más óptima que permita una ejecución rápida en pequeños controladores.
Una forma sencilla de usar MicroPythón es mediante el entorno integrado de programación Thonny.
Thonny está disponible para los principales sistemas operativos: Linux, OSX y Windows. Y está disponible para su instalación gratuita dede su página.
Una vez realizada la descarga e instalación del IDE, con Thonny podemos realizar y ejecutar programas en Python que se ejecuten en el propio ordenador, o también podemos escribir programas específicos que se guarden y ejecuten en la placa controladora.
7. Programación con Python y Raspberry Pi Pico
7.1 - Instalación y configuración
En el siguiente vídeo se muestra el procedimiento para instalar o actualizar el firmware de la placa Raspberry Pi PIco, así como la instalación y configuración del entorno de trabajo Thonny, para la programación en MicroPyton
Enlaces de descarga:
7.2 - Primer programa y sistema de archivos
En este segundo vídeo de la serie de iniciación a la Raspberry Pi Pico, vamos a ver como escribir los primeros programas y como gestionarlas dentro del espacio de memoria de la placa controladora.
7.3 - La librería Dodo para MicroPython
Dentro del repositorio PyPi encontramos la librería que hemos desarrollado para poder trabajar con las distintas variantes de la placa Dodo. A partir del minuto 4 del siguiente vídeo se dan las instrucciones para instalar esta librería en Thonny.
Una vez instalada y configurada para el robot Dodo Lite, esta librería te permite usar las siguientes funciones:
- mueve_motor(motor,velocidad) donde motor [1 ó 2] y velodidad[-100 a 100]
- para_motor(motor) donde motor [1 ó 2]
- enciende_rgb(posición del led, color) donde posición del led [0 a 4] y color [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- fila_rgb( color) donde color [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- apaga_rgb( posición del led) donde posición del led [0 a 4
- degradado_rgb(color1, color2) donde color1 y color2 [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- escribe_pantalla(texto, x ,y) donde texto [cadena de hasta 16 caracteres], x [0 a 127] e y [0 a 63]
- borra_pantalla()
- lee_us( Pin)
7.4 - ejemplos de programa
Índice de contenidos de la documentación del Kit Robot Dodo Lite:
- Antes de empezar
- Descripción
- Contenido del kit
- Placa Dodo Lite
- Montaje del robot
- Thonny: el entorno de programación con MicroPython
- Programación con Python y Raspberry Pi Pico
1. Antes de empezar
Este kit permite montar un robot que está diseñado para programarse en Python con gran facilidad gracias a la amplia librería que hemos desarrollado a tal efecto.
A pesar de su aparente sencillez, este robot permite trabajar aspectos complejos de la programación y el control, una característica que le hace especialmente indicado para su uso educativo de 4º ESO a 2 Bach. Si estas buscando un robot con programación sencilla por bloques te recomendamosque uses otros robots basados en tecnología Crumble, como el MiiBot o el Bilby.
Atención: es muy importante seguir el proceso de montaje con cuidado y precisión. De realizarse de forma incorrecta el robot podrá resultar dañado de forma irreversible. Los daños producidos por un uso o montaje incorrecto del robot no están cubiertos por la garantía.
2. Descripción
El kit del robot educativo Dodo Lite es un producto Complubot, de fabricación propia, que aúna la robustez mecánica, un gran número de sensores y actuadores y la potencia del controlador Raspberry Pi Pico.
3. Contenido del kit
Este kit se suministra en una caja contenedora que contiene todo el material y que también puede servir para guardar el robot una vez montado. En este caso hay que desconectar el módulo Bluetooth.
Dentro de la caja contenedora del kit podemos encontrar los siguientes elementos:
- Un chasis metálico
- Una rueda loca
- Dos motores de 140 rpm@6V
- Dos ruedas motrices de 65mm de diámetro
- Una placa Dodo Lite
- Una placa controladora Raspberry Pi Pico
- Un display OLED gráfico de 128 x 64 pixels
- Un Driver de control de motores DRV 8833
- Un módulo sigue líneas de tres elementos activos (Bilby)
- Un módulo medidor de distancia por ultrasonidos (Bilby)
- Cables de conexiones:
- 1 cable de conexión Molex-Header de 150mm
- 3 cables de conexión Molex-Header de 200mm
- Un cable micro USB
- Un destornillador PH1 (todos los tornillos de este kit tienen cabeza PH1)
- Tornillería y separadores
- 8 tornillos M3x6mm con cabeza alomada
- 4 tornillos M3x30mm con cabeza alomada
- 2 tornillos M2x6mm con cabeza alomada
- 4 tuercas M3
- 2 saparadores (H-H) nylon M2x12mm
- 2 separadores (M-H) metélicos M3x8mm
- 4 separadores (H-H) metálicos M3x25mm
- 4 arandelas M3
Todos los elementos que así lo requieran se suministran soldados y listo para su uso. No es necesario usar el soldador ni ninguna otra herramienta, más allá de un simple destornillador de estrella, para completar el montaje de este robot.
4. Placa Dodo Lite
La placa Dodo Lite es una versión reducida de la placa Dodo de Complubot. La principal diferencia es que mientras que la placa Dodo puede controlar robots de hasta cuatro ruedas (una plataforma Mecanum, por ejemplo), La controladora Dodo Lite está diseñada para robots con plataforma diferencial: dos ruedas motrices y un punto de apoyo.
Esta placa ha sido diseñada para facilitar el uso y la aplicación robótica de la controladora Raspberry Pi Pico. En ella podemos encontrar los siguientes elementos:
En esta imagén se muestra como referencia la conexión del módulo de comunicaciones Bluetooth HC-05, Este es un accesorio que se compra de forma independiente y que no está incluido en el contenido de este kit.
5. Montaje del robot
A continuación se muestran los pasos a seguir para conseguir el montaje del robot.
Atención: es muy importante seguir el proceso de montaje con cuidado y precisión. De realizarse de forma incorrecta el robot podrá resultar dañado de forma irreversible. Los daños producidos por un uso o montaje incorrecto del robot no está cubiertos por la garantía.
5.1 Colocación de las pilas
Este robot funciona con tres pilas alcalinas de 1,5V que suministran 4,5V en total para su funcionamiento. También puede operar con baterías recargables de NiMh, aunque con un rendimiento mucho menor ya que este tipo de baterías recargables proporcionan un voltaje menor (1,2V) por elemento.
En este promer paso colocamos el interruptor de encendido en la posición “OFF” e insertamos las tres pilas alcalinas de 1,5V en el portapilas, respetando la polaridad en todo momento.
5.2 soportes del display
5.3 Sujeción de los motores
6. Thonny: el entorno de programación con MicroPython
Hay muchas formas de programar una Raspberry Pi Pico: directamente en lenguaje C, desde el Ide de Arduino, mediante bloques, con CircuitPython o con MicroPython. De todas ellas la que más interesante nos parece en la actualidad es MicroPython y en especial desde el IDE Thonny.
Para sacarle el mayor partido a la Raspberry Pi Pico desde Complubot recomendamos programarla en Python.
MicroPython es una versión simplificada de Python 3 que está especialmente diseñada para funcionar en sistemas basados en microcontrolador, como es este caso.
Así pues, con MicroPython usamos la sintaxis de Python y la mayoría de sus recursos de una forma más óptima que permita una ejecución rápida en pequeños controladores.
Una forma sencilla de usar MicroPythón es mediante el entorno integrado de programación Thonny.
Thonny está disponible para los principales sistemas operativos: Linux, OSX y Windows. Y está disponible para su instalación gratuita dede su página.
Una vez realizada la descarga e instalación del IDE, con Thonny podemos realizar y ejecutar programas en Python que se ejecuten en el propio ordenador, o también podemos escribir programas específicos que se guarden y ejecuten en la placa controladora.
7. Programación con Python y Raspberry Pi Pico
7.1 - Instalación y configuración
En el siguiente vídeo se muestra el procedimiento para instalar o actualizar el firmware de la placa Raspberry Pi PIco, así como la instalación y configuración del entorno de trabajo Thonny, para la programación en MicroPyton
Enlaces de descarga:
7.2 - Primer programa y sistema de archivos
En este segundo vídeo de la serie de iniciación a la Raspberry Pi Pico, vamos a ver como escribir los primeros programas y como gestionarlas dentro del espacio de memoria de la placa controladora.
7.3 - La librería Dodo para MicroPython
Dentro del repositorio PyPi encontramos la librería que hemos desarrollado para poder trabajar con las distintas variantes de la placa Dodo. A partir del minuto 4 del siguiente vídeo se dan las instrucciones para instalar esta librería en Thonny.
Una vez instalada y configurada para el robot Dodo Lite, esta librería te permite usar las siguientes funciones:
- mueve_motor(motor,velocidad) donde motor [1 ó 2] y velodidad[-100 a 100]
- para_motor(motor) donde motor [1 ó 2]
- enciende_rgb(posición del led, color) donde posición del led [0 a 4] y color [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- fila_rgb( color) donde color [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- apaga_rgb( posición del led) donde posición del led [0 a 4
- degradado_rgb(color1, color2) donde color1 y color2 [rojo, verde, azul, amarillo, cian, magenta, blanco o apagado]
- escribe_pantalla(texto, x ,y) donde texto [cadena de hasta 16 caracteres], x [0 a 127] e y [0 a 63]
- borra_pantalla()
- lee_us( Pin)
7.4 - ejemplos de programa
- Etapa educativa
- Plataforma
Productos relacionados
 EN STOCK
EN STOCK
- Raspberry Pi Pico - Con headers soldados
- 6,99 €21.00% IVA incluido

- AGOTADO TEMPORALMENTE
- Kit Dodo Board
- 80 €21.00% IVA incluido
