DFR0548
MIcro:Bit - Placa de expansión para control de motores
Placa de expansión para el control de motores de corriente continua con Micro:bit
Descripción
A diferencia de Crumble, el controlador Micro:bit no pue controlar directamente motores. Es por eso por lo que necesita una placa de expansión como esta que incluye un driver de control de motores (HR8833).
Además esta placa de expansión nos proporciona otras muchas características interesantes como clemas y headers de conexión para poder acceder de forma sencialla a las distintas entradas y salidas de la controladora Micro:Bit así como la conexión de servos y motores.
Contenido del producto
Este producto incluye la placa de expansión y un cable de alimentación que permite conectar el sistema a un powerbank externo (no incluido)
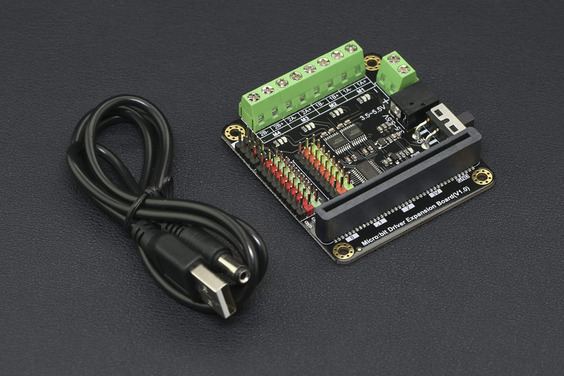
No incluye la placa controladora Micro:Bit.
Especificaciones
- Salida digital: 0V / 3.3V
- Salida analógica: 0~3.3V DC
- Alimentación externa: 3.5 a 5.5V DC
- Pines Micro:Bit disponibles mediante headers: 9 (P0 P1 P2 P8 P12 P13 P14 P15 P16)
- Salidas para control de servos: 8
- Salida de control de motoesr: 4 motoes DC o 2 motores paso a paso
- Corrinte máxima total de los motores: 1,5A
- Dimensiones: 63x58mm
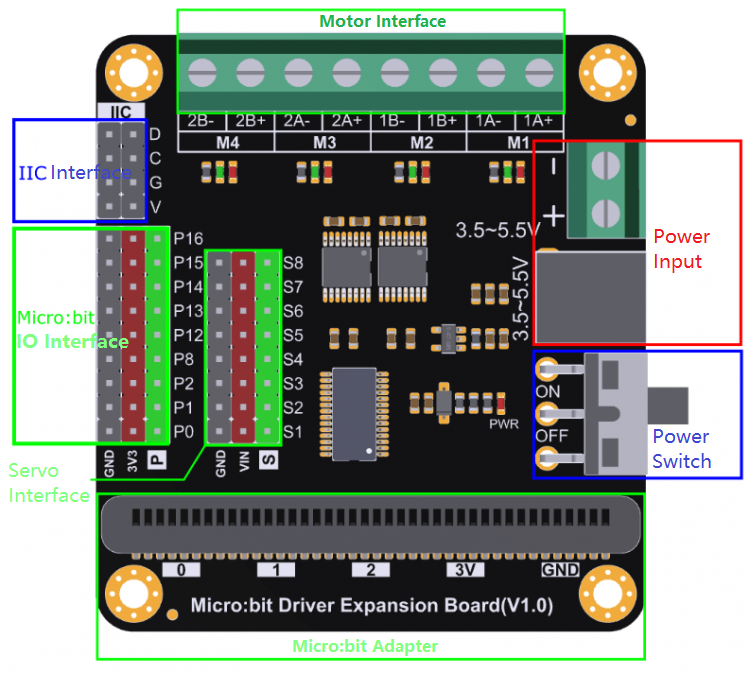
Conexiones
En el siguiente diagrama se muestran las distintas conexiones de esta placa de expansión.
Programas de ejemplo
Para usar las funciones de esta placa es necesario añadir la correspondiente librería, para ello solo tienes que copiar y pegar el siguiente enlace en el buscador de estensiones del entorno de trabajode Micro:Bit:
https://github.com/DFRobot/pxt-motor
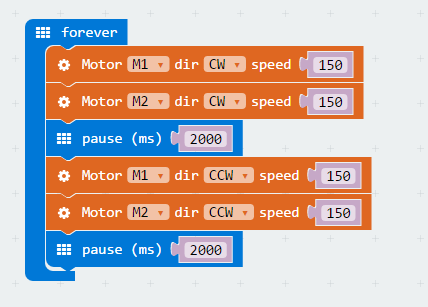
1 - Control de motores de corriente continua
En el siguiente ejemplo los motores M1 y M2 avanzan y retroceden a intervalos de 2 segundos de forma continua (bucle infinito)
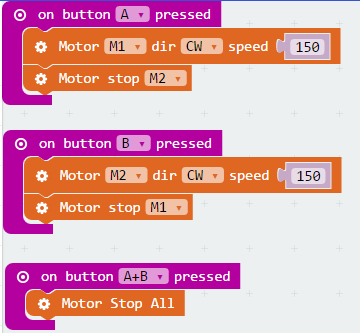
2 - Control de motores mediante pulsadores
En el siguiente ejemplo podemos controlar el avance de los motores M1 y M2 mediante los pulsadores A y B de la placa Micro:Bit. Si pulsamos ambos de forma simultánea los dos mootres se paran.
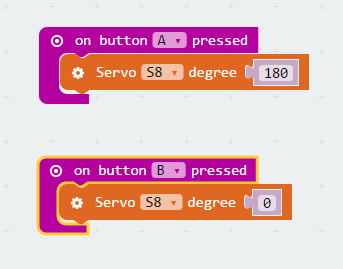
3 - Control de servos
En el siguiente ejemplo movemos un servo entre las posiciones de 0º y 180º mediante los pulsadores A y B
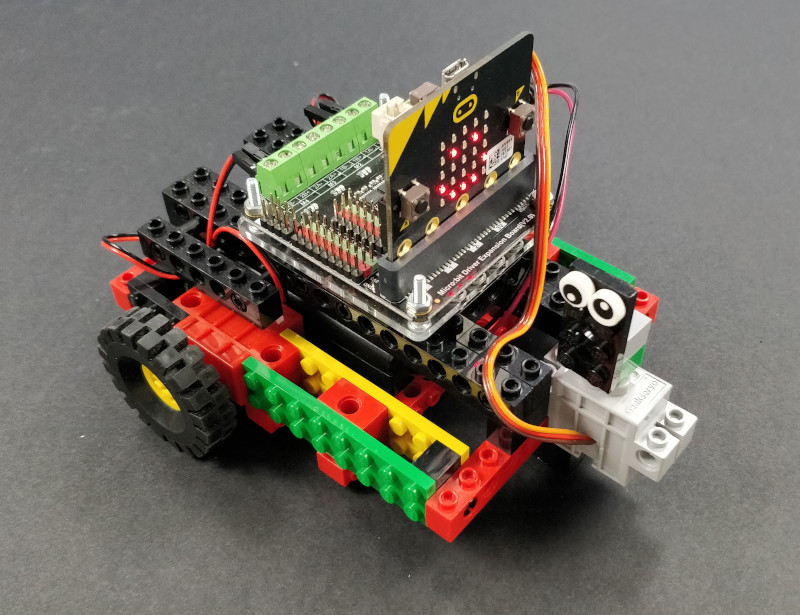
Ejemplo de montaje
En la imagen se muesra un ejemplo de proyecto de robot móvil controlado con Micro:Bit y esta placa de extensión para el control de motores.