


2016000000139
Nuevo - Crumble Electronics Kit
Kit de iniciación a la tecnología robótica basado en el controlador Crumble Mini
Conexionado rápido mediante cables de prototipado
Sistema de alimentación protegido
Incluye gran variedad de sensores y actuadores
Programable mediante entorno gráfico Crumble
Descargas
Toda la información (programas, recursos, manuales...) en la página del proyecto Crumble
Contenido del kit
- Placa controladora Crumble Mini con los pines soldados
- Módulo de alimentación con protección para placas de prototipado
- Placa de prototipado de 400 contactos
- Módulo RGB NeoPixel de 8 elementos
- Servo SG90 de 180º
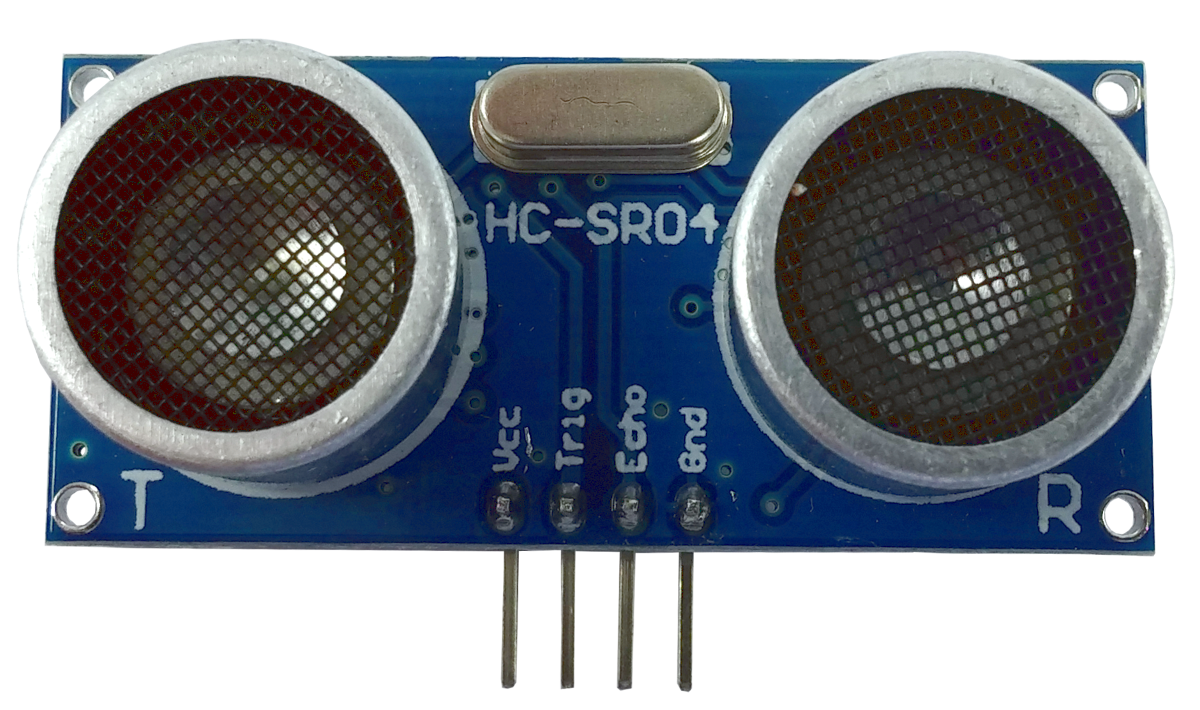
- Sensor ultrasónico de distancias HC-SR04
- Motor con reductora y cables de prototipado
- Potenciómetro de 10 K
- Zumbador activo
- 4 ledes de color rojo de 5mm
- 4 ledes de color verde de 5mm
- 4 ledes de color amarillo de 5mm
- 4 pulsadores de prototipado
- 2 sensored de luz LDR tipo PGM5516
- 20 cables de prototipado M - M de 100 mm de longitud
- Cable miro USB de 1m de longitud
- Base de trabajo
- 3 pilas alcalinas AA
- Caja clasificadora de dos niveles
Crumble Mini, toda la potencia de Crumble en un mínimo espacio
Crumble Mini tiene las mismas características que la placa Crumble original, pero en un espacio reducido. Con Crumble Mini podemos hacer proyectos en un mínimo espacio o sacar ventaja a su compatibilidad con las placas de prototipado.
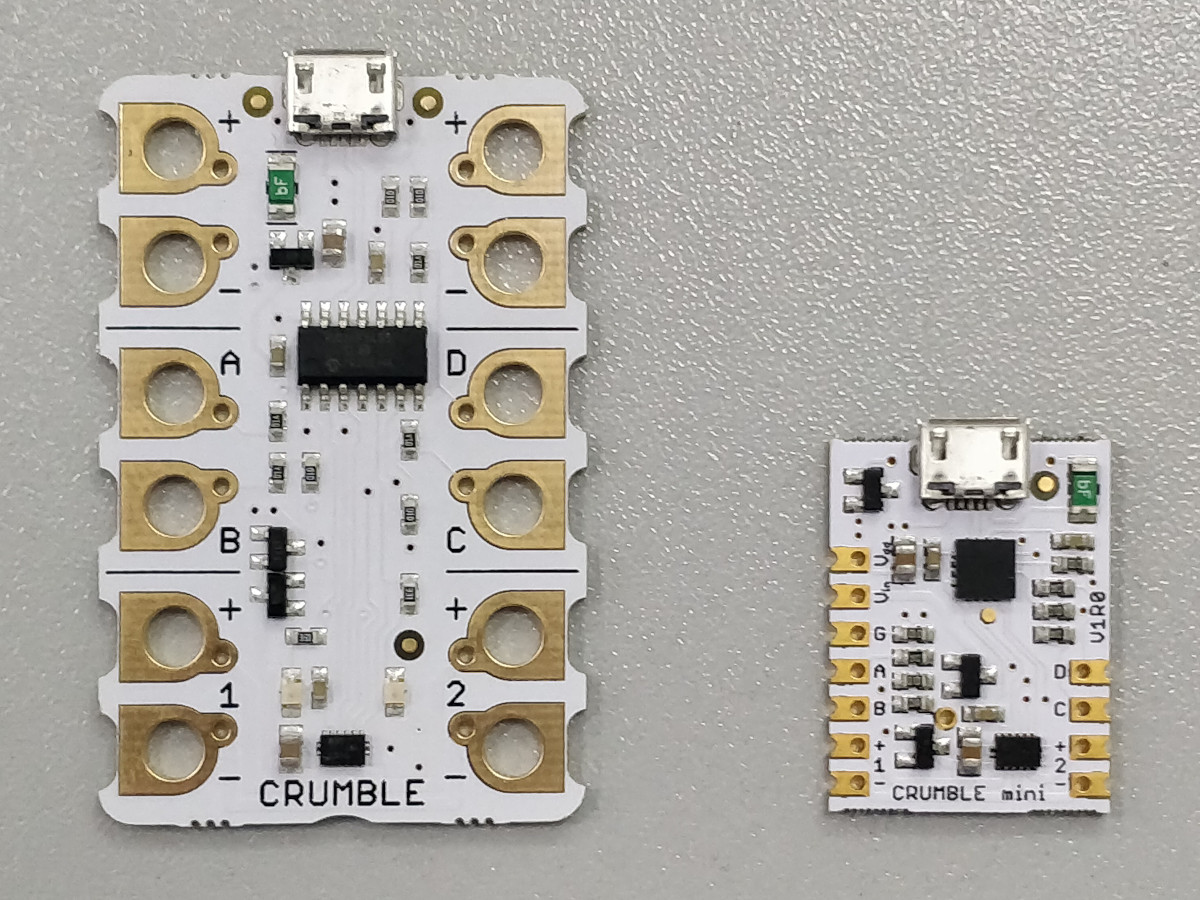
Crumble Mini mide 19 mm x 25 mm, frecte a los 33 mm x 51 mm de la placa Crumble original, pero esto no impide incorporar el 100% de sus características:
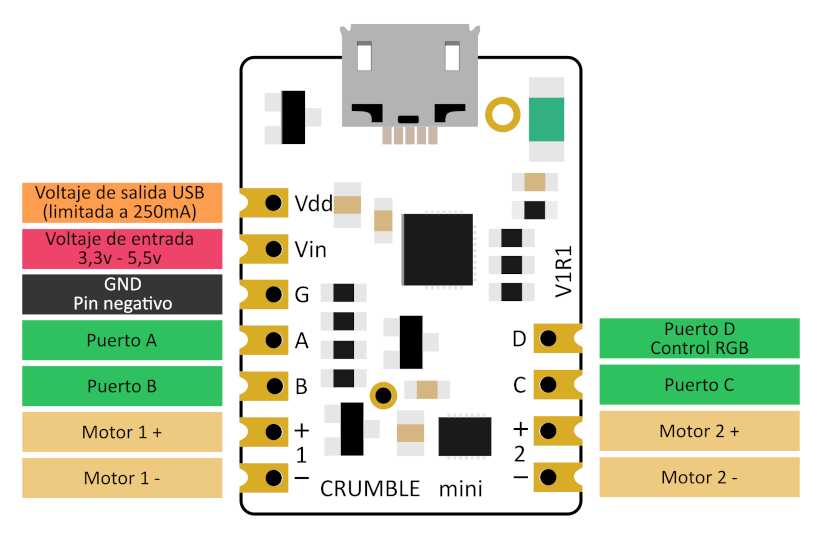
- 4 Pines de propósito general (A, B, C y D), usables como entradas y salidas digitales y entradas analógicas
- 2 salidas independientes de control de motores (Motro 1 y Motor 2) con una potencia máxima de salida por canal de hasta 5W
- Implementación de protocolo Neopixel (D)
- Control de hasta 4 servos (A, B, C y D)
- Control de hasta 4 sensores de distancia por ultrasonidos (A, B, C y D)
- Protección eléctrica en todos los pines de entrada / salida (A, B, C y D)
- Resistencia de PullDown en todos los pines de entrada / salida (A, B, C y D)
Exquema de conexiones de la Crumble Mini
Programación de la Crumble Mini
La controladora Crumble Mini se programa de la misma forma que la placa Crumble original: mediante el entorno de programación por bloques de Crumble. Esta es una aplicación gratuita que esta disponible para Windows, Linux, OSX y Chromebook.
Todos los programas de la placa Crumble original son 100% compatibles con la Crumble Mini.
El entorno de programación Crumble es muy sencillo de usar. Usa el mismo paradigma de programación que Scratch, pero con bloque específicos para el control de dispositivos y la programación de robots. Este entorno se caracteriza por su gran estabilidad (no necesitainstalar ningún driver adicional) y por su dinamismo, apenas necesita una fración de segudo para programar (programación real) la placa Crumble.
Alimentación de la Crumble Mini
A continuación se muestran algunos ejemplos de montajes y programación con la Crumble Mini, con los pines soldados, sobre una placa de prototipado. En estos ejemplos usamos el Módulo de alimentación con protección para placas de prototipado, pero puedes usar cualquier portapilas con tres pilas alcalinas de 1,5 V (alimentación total a 4,5 V).
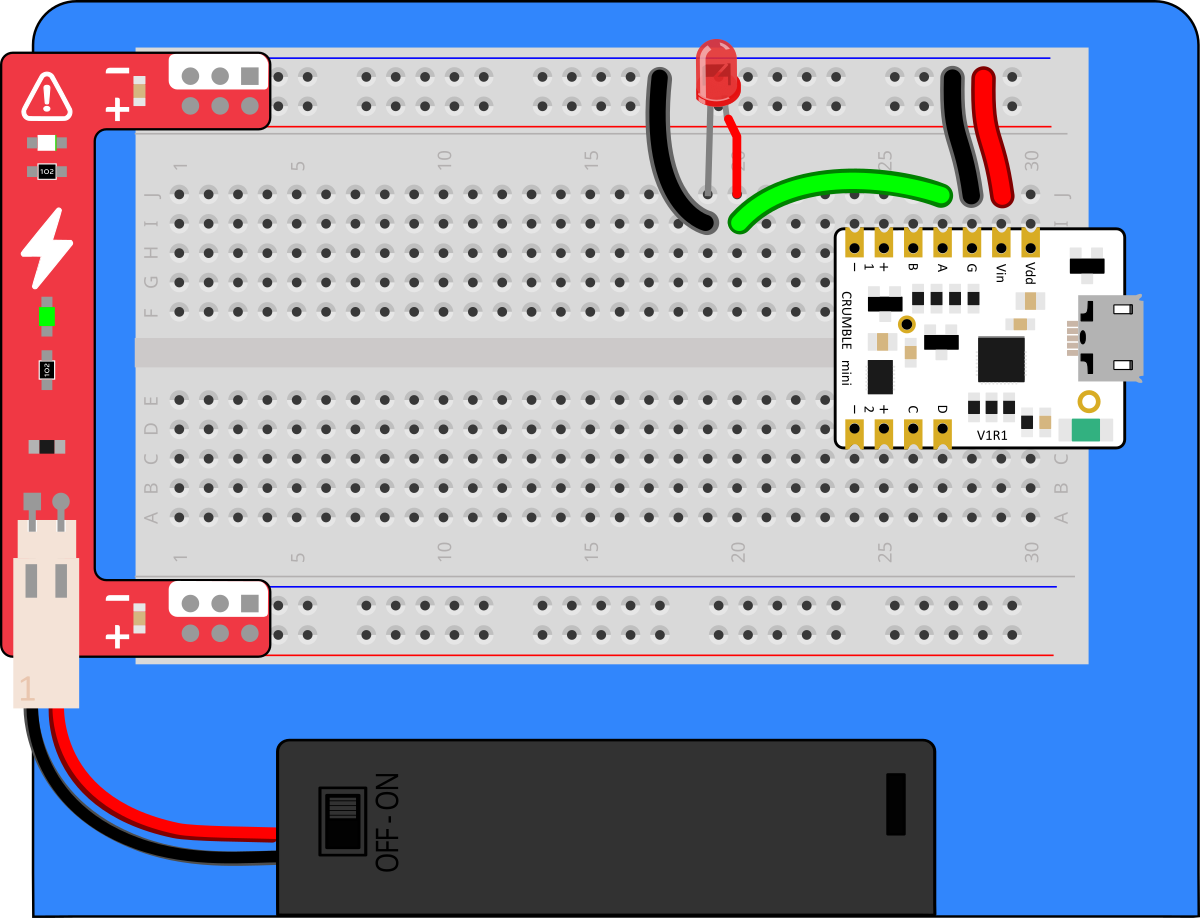
Blink, parpadeo de un led conectado a una salida digital
En esta actividad conectamos un led al Puerto A de la Crumble Mini y programaremos un encendido intermitente (Blik).
Puede sorprender que el led se conecta directamente al puerto, sin necesidad de añadir una resistencia de polarización: un led rojo trabaja a 1.8V y en este montaje la salida digital proporciona 4,5V, así que se necesita una resistencia de polarización que absorva la caida de tensión.
En realida esa resistencia, de 100 Ohm, se encuentra dentro de la propia Crumble Mini: se trata de la resistencia de protección, que también se puede usar como resistencia de polarización. Esto puede sorprender un poco, ya que ninguna de las otras placas populares (Arduino, Micro:Bit, Raspberry, ESP...) disponen de esta característica, así que con ellas sí es necesario añadir una resistencia en serie con el led. Con Crumble y Crumble Mini no se necesita.
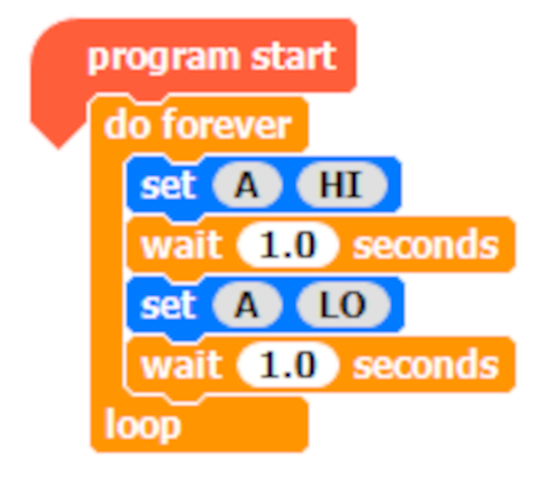
Para programar esta actividad en la placa tenemos que conectar la placa al ordenador mediante un cable USB, encajar los bloques del programa y pulsar el triángulo verde de descarga.
Si la alimentación está conectada, el led comenzará a parpadear de forma casi instantánea.
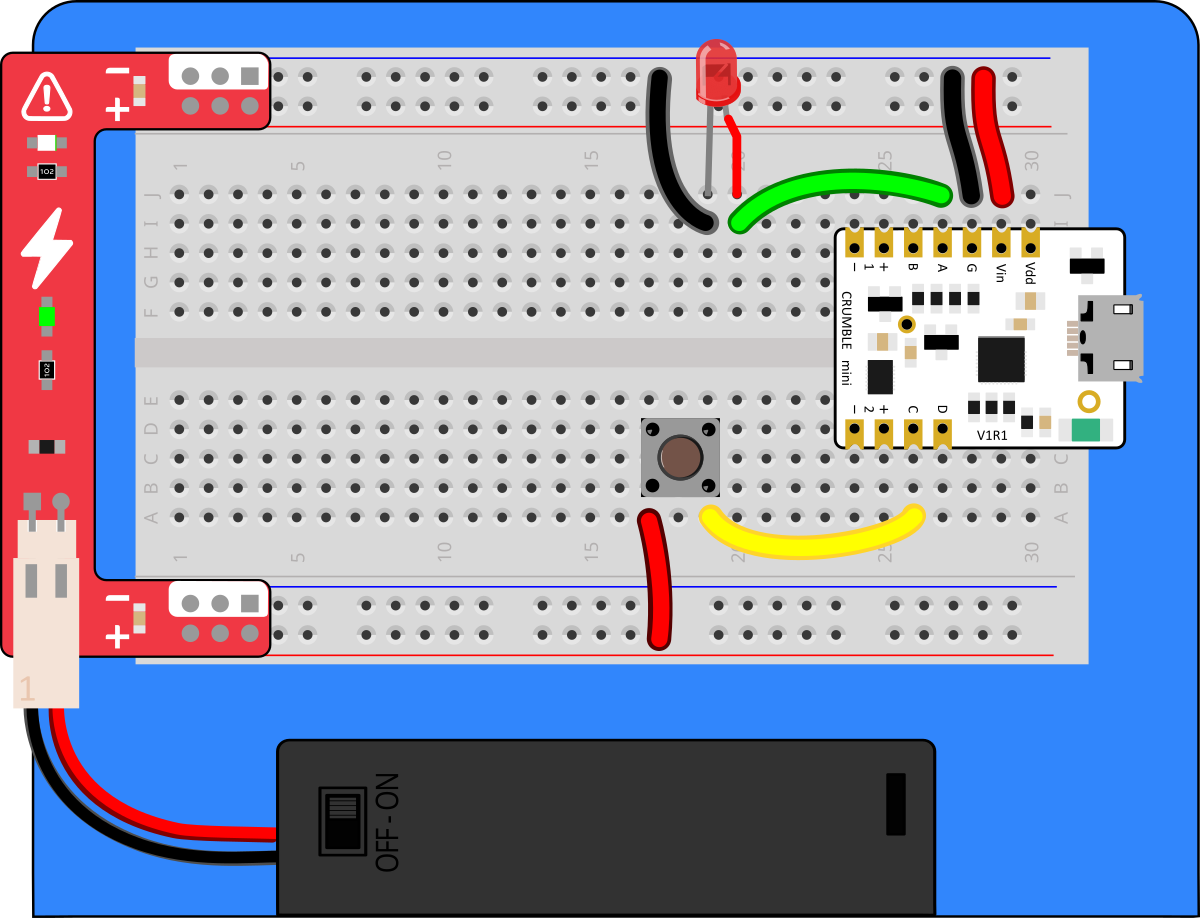
Control de un led mediante un pulsador
En esta actividad controlaremos el encendido de un led mediante un pulsador. Ya hemos visto que el led no necesita de una resistencia de polarización externa, pero además podemos conectar un pulsador directamente ya que cada puerto (A, B, C y D) también dispone de una resistencia de Pull-Down (de 100K) que fija el nivel del puerto cuando el pulsador está abierto. De esta manera leremos un nivel alto (HI) cuando el pulsador este pulsado y un nivel bajo (LO) cuando no lo esté.
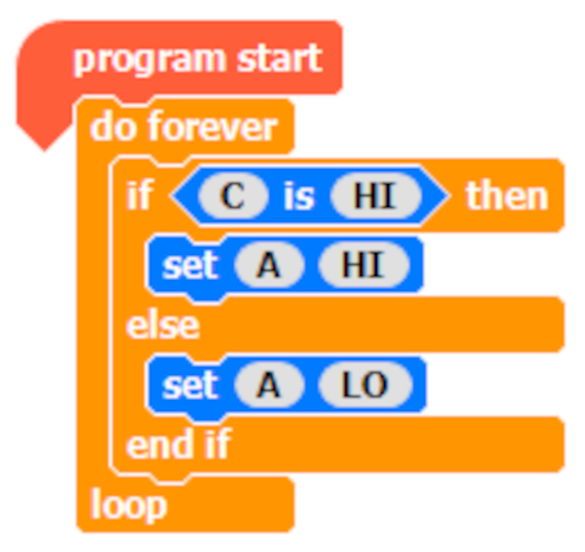
En esta versión del programa el led permanece apagado hasta que el pulsador se pulse, momento en el que se encenderá.
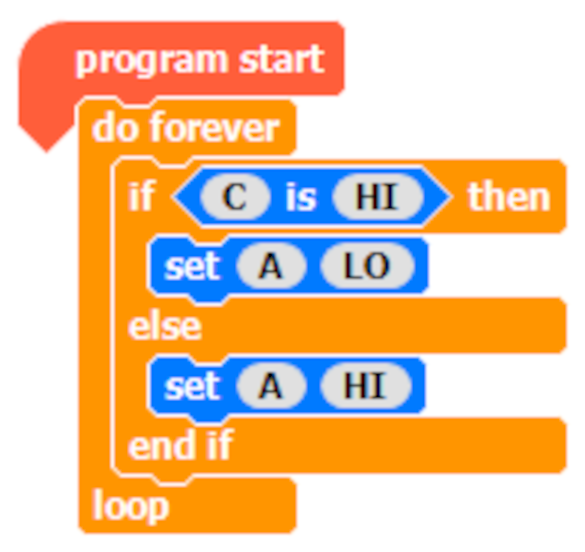
En esta versión del programa el led permanece encendido hasta que el pulsador se pulse, momento en el que se apagará.
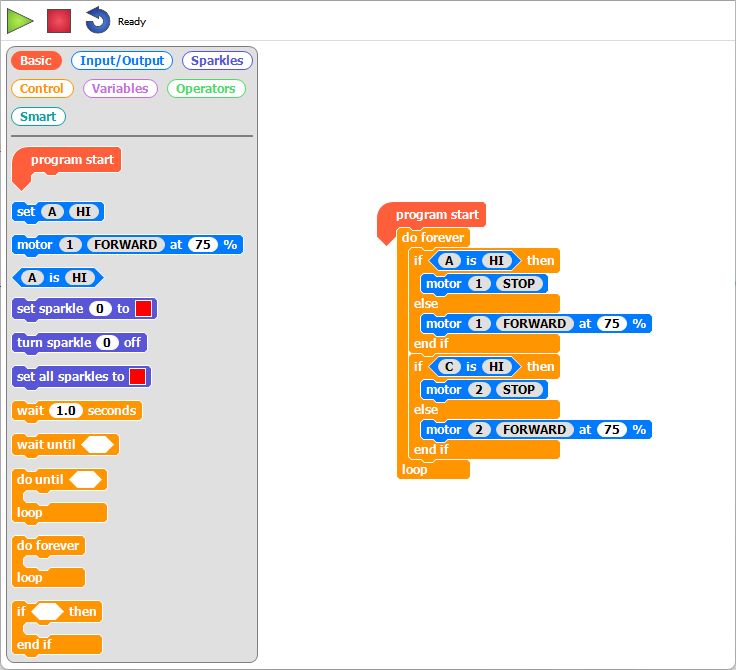
Funciones lógicas con dos pulsadores y un led
En esta activida conectamos dos pulsadores y un led a la placa Crumble Mini para implementar funciones lógicas de dos variables.
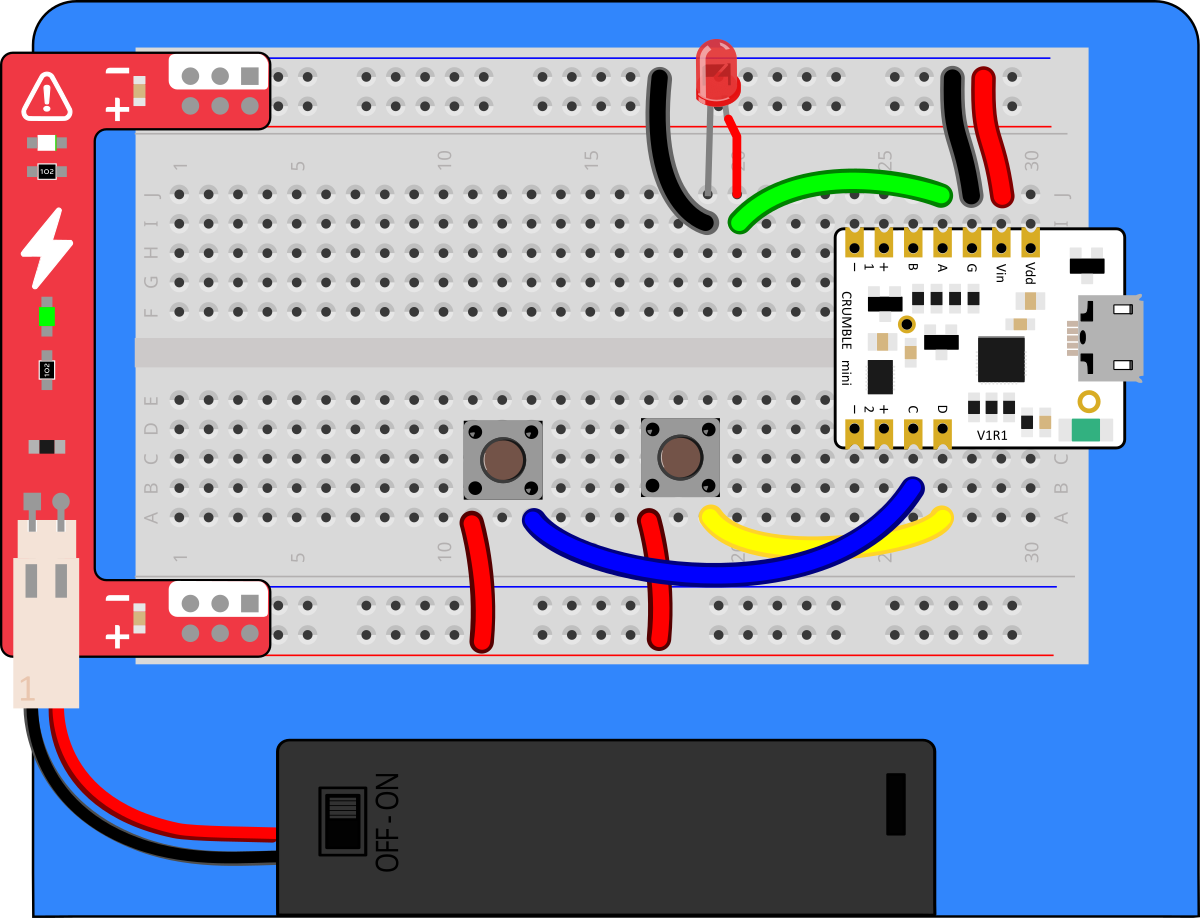
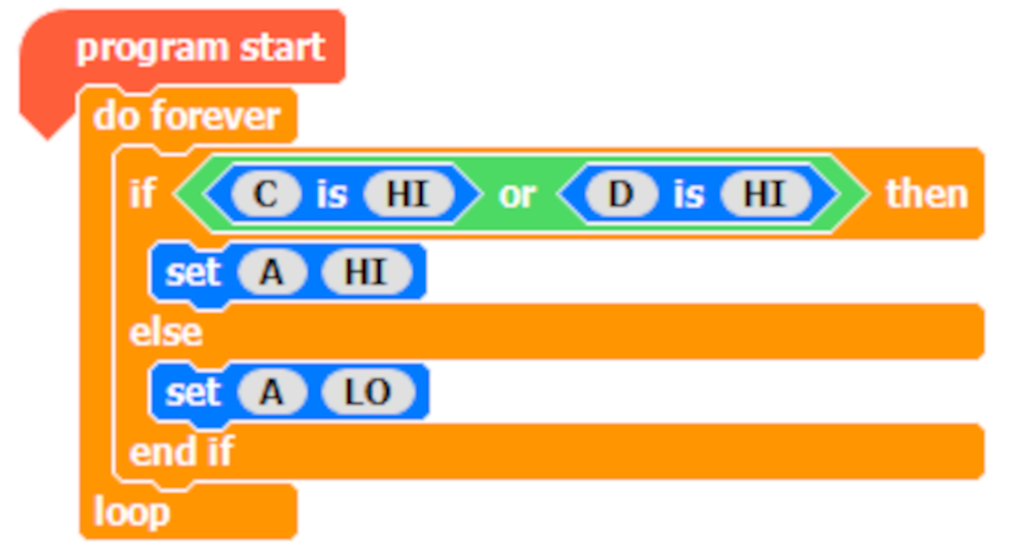
Implementación de la función lógica OR.
El led se enciende si se pulsa cualquiera de los dos pulsadores.
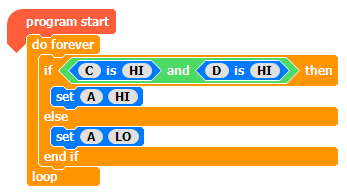
Implementación de la función lógica AND
El led solo se enciende si se pulsan ambos pulsadores a la vez.
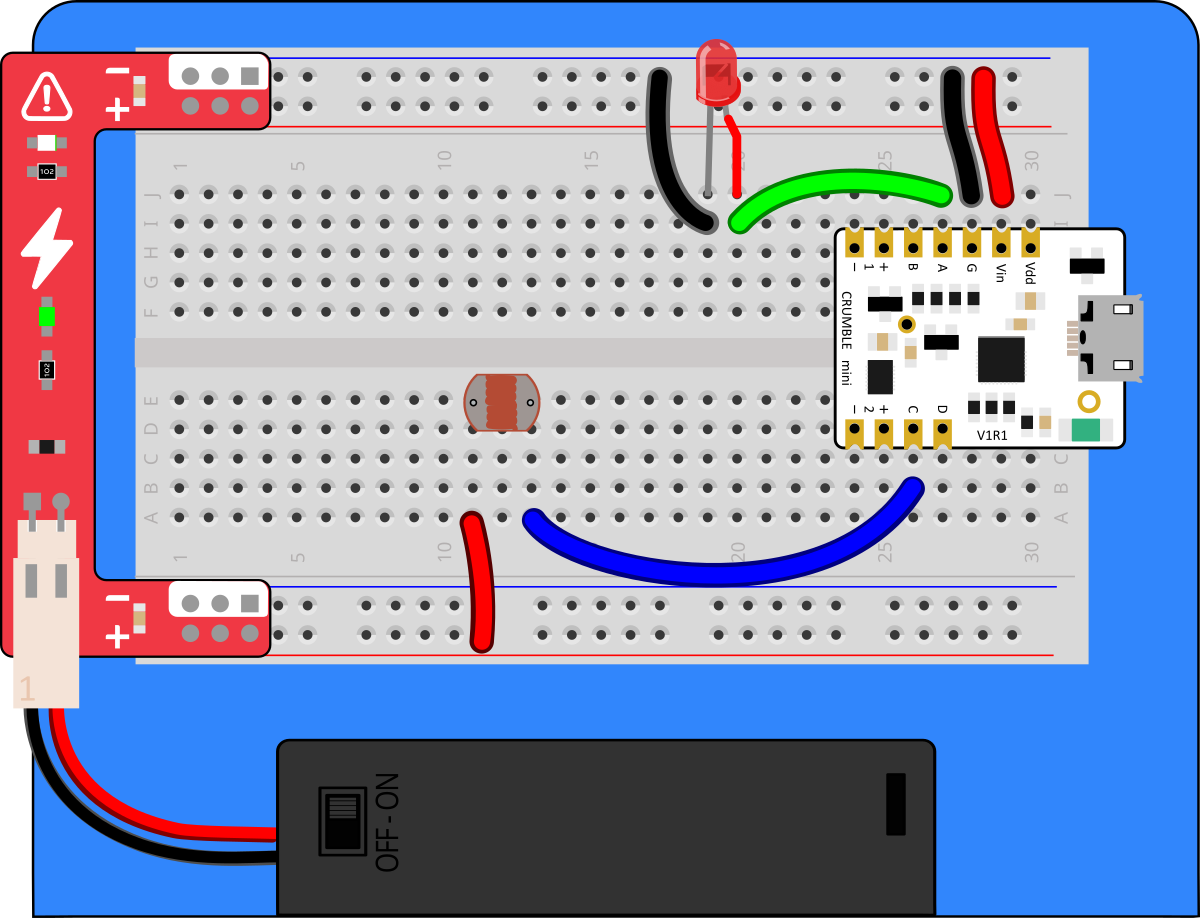
Control automático de iluminación
Con un sensor de luz (LDR) y un led podemos construir un sencillo control de iluminación.
La resistencia de Pull-Down que tenemos en cada puerto nos permite conectar un sensor resistivo sin necesidad de añdir una resistencia externa para hacer un divisor de tensión.
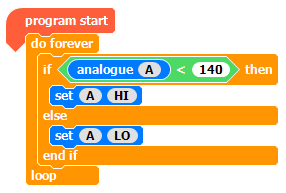
En este ejemplo de programa hacemos uso de una variable para almacenar el valor analógico que nos proporciona el sensor de luz (LDR).
Sï la medida está por debajo del valor de consigna (140 en este ejemplo) el led se enciende y si es mayor o igual, el led se apaga.
El rango máximo de variación de una entrada analógica del Crumble Mini es de 0 a 255, aunque el nivel de salida de la LDR no dará el rango completo. Podemos comprobar las variaciones de señal de la LDR mediante el siguiente programa.
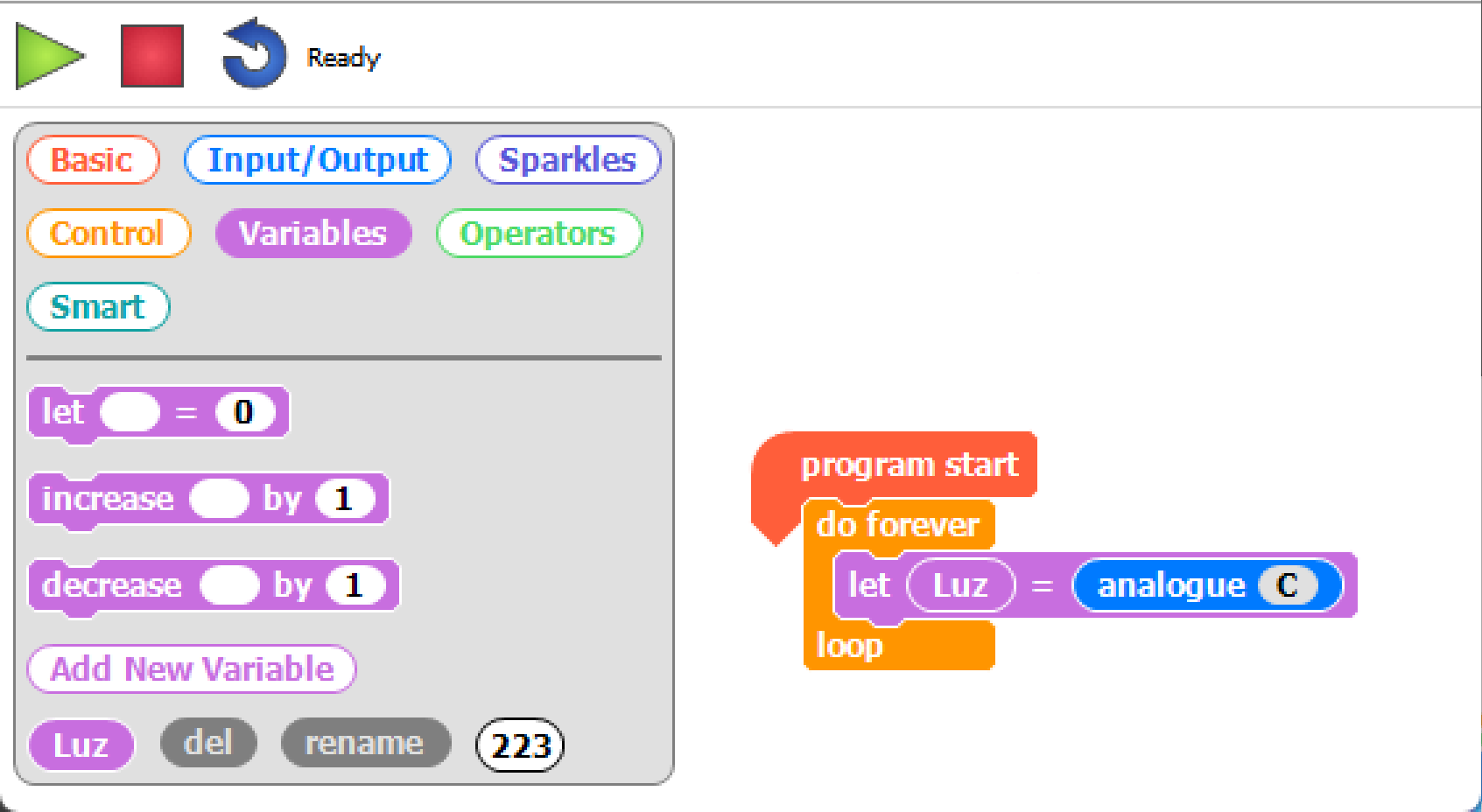
Veremos los valores en la ventana de la aplicación si ejecutamos el programa mientras la placa está conectada mediante el cable USB y tenemos activa la pestaña Variables.
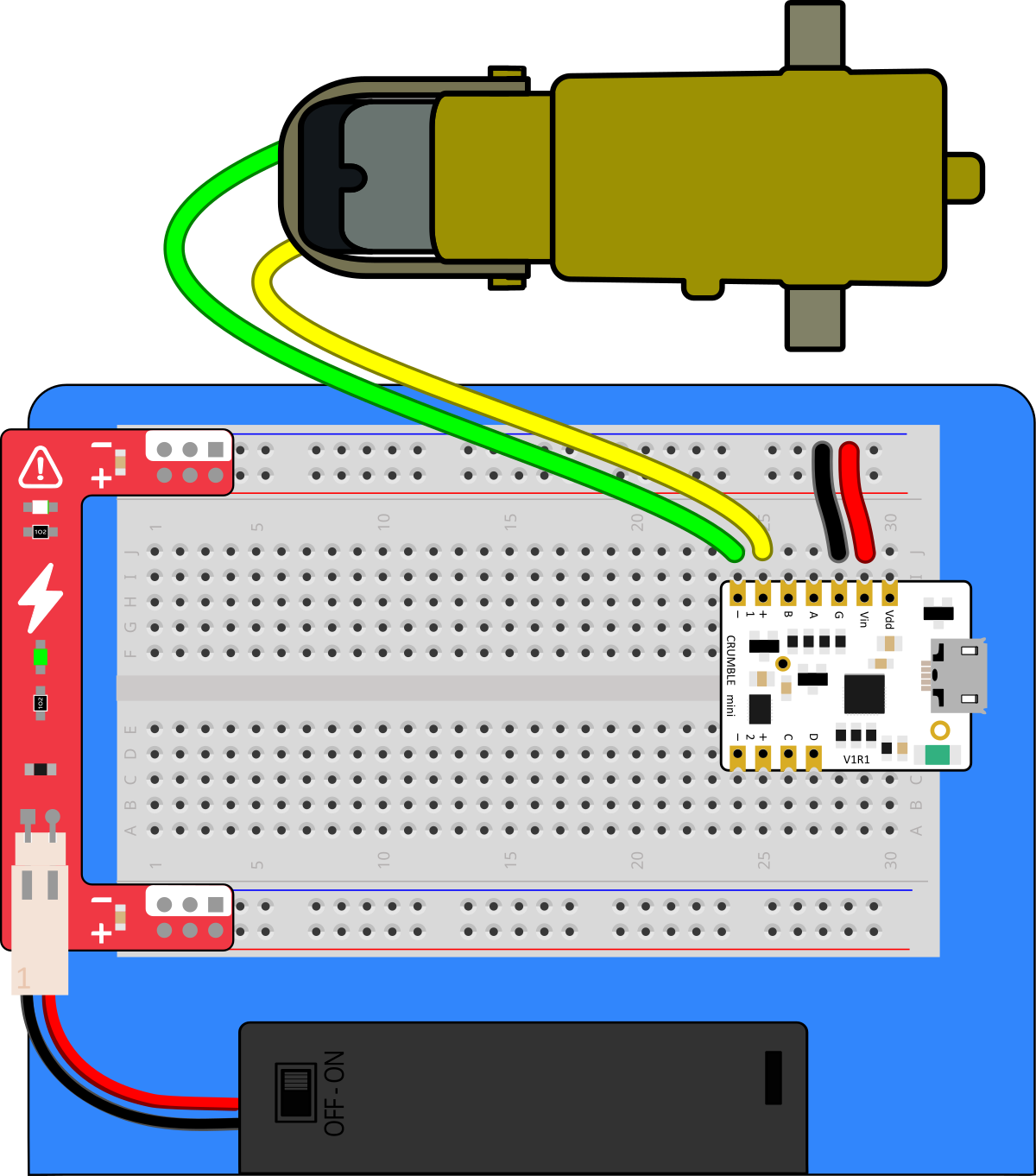
Control de un motor
Crumble Mini dispone de un driver de potencia (con telnología MOSFET) capaz de controlar hasta dos motores (de 5W de potencia máxima) de forma independiente. En esta actividad vamos a controlar la velocidad de uno de ellos.
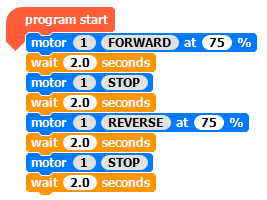
Con este primer programa establecemos un secuencia de movimientos en el robot, cada uno se ejecuta durante dos segundos. Comenzamos con un avance, después paramos, retrocedemos a continuación y paramos de nuevo.
En realidad la última espera no es necesaria ya que el programa se termina, pero es buena idea tener claro que cada movimiento requiere de un tiempo de espera para que este pueda realizarse.
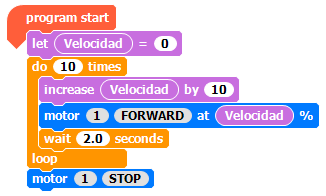
En este segundo ejemplo de programa se implementa un "arranque suave" del motor.
Para ello ejecutamos un bucle que se repite 10 veces, en cada iteración la velocidad se incrementa un 10% hasta alcanzar el valor máximo (100%).
Alarma de proximidad con sensor de distancia por ultrasonidos
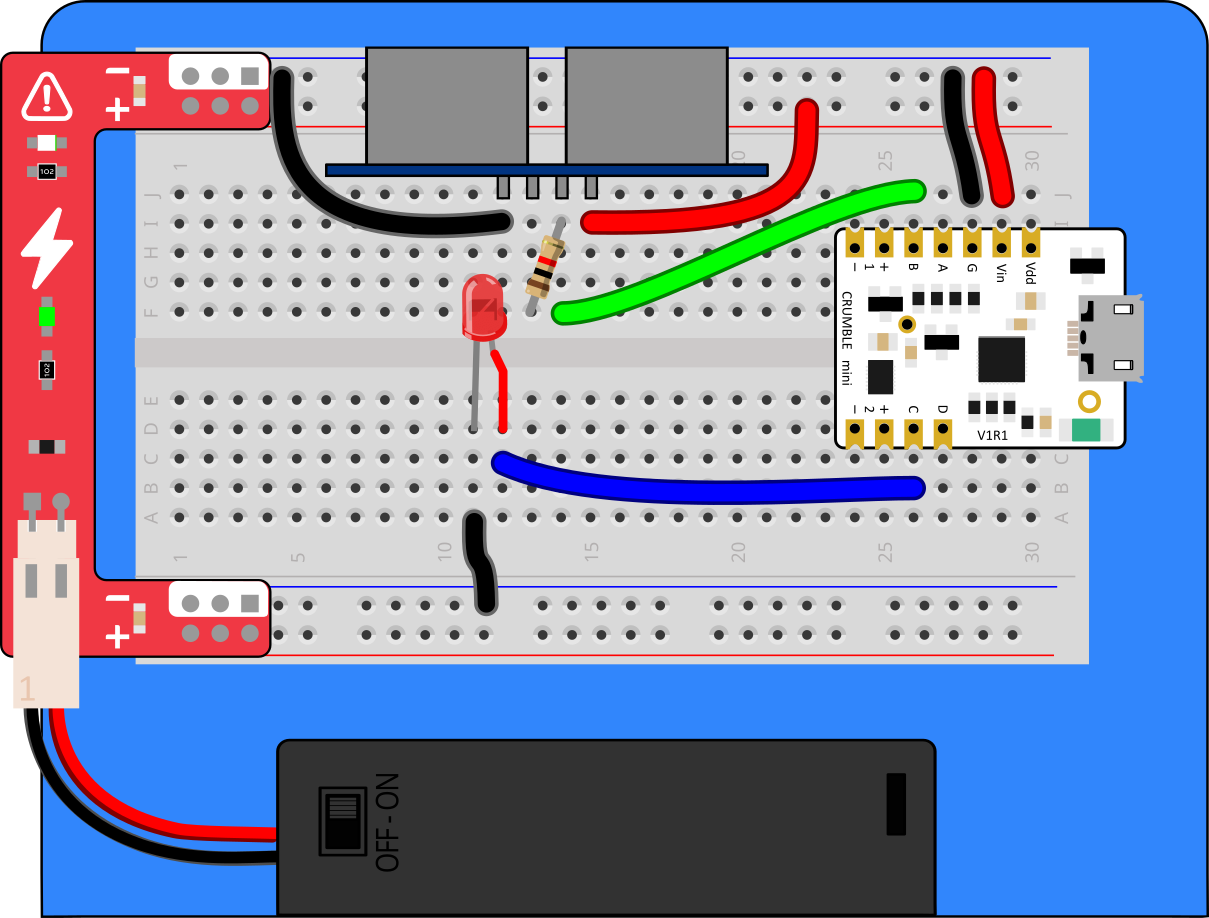
En esta actividad montamos un sensor de distancias por ultrasonidos, tipo HC-SR04, y un led para indicar el estado activo de la alarma.
En el circuito usaremos un único puerto para controlar y medir la distancia que nos proporciona el HC-SR04, para ello unimos los pines TRIG y ECHO del sensor mediante una resistencia de 1K y conectamos el terminal TRIG a un puerto, el puerto B en este caso.
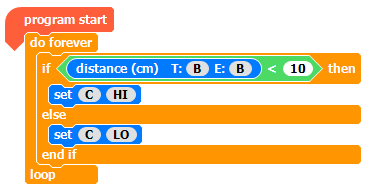
El programa es sencillo. en un único bloque realizamos la medida de la distancia y la comparamos con la referencia (10 cm, en este caso).
Si hay un objeto a una distancia menor de 10cm, el led se enciende. Permanece apagado en caso contrario.
Control del brillo de un led mediante PWM
En esta actividad vamos a controlar el brillo de un led con la salida de control de motores. Esta salida genera una señal PWM que nos permite controlar cargas de hasta 1A. En este caso el led sí necesita de la resistencia de polarización ya que está conectado a una salida de potencia que puede proporcionar hasta 4,5V y quue limita a 1A máximo.
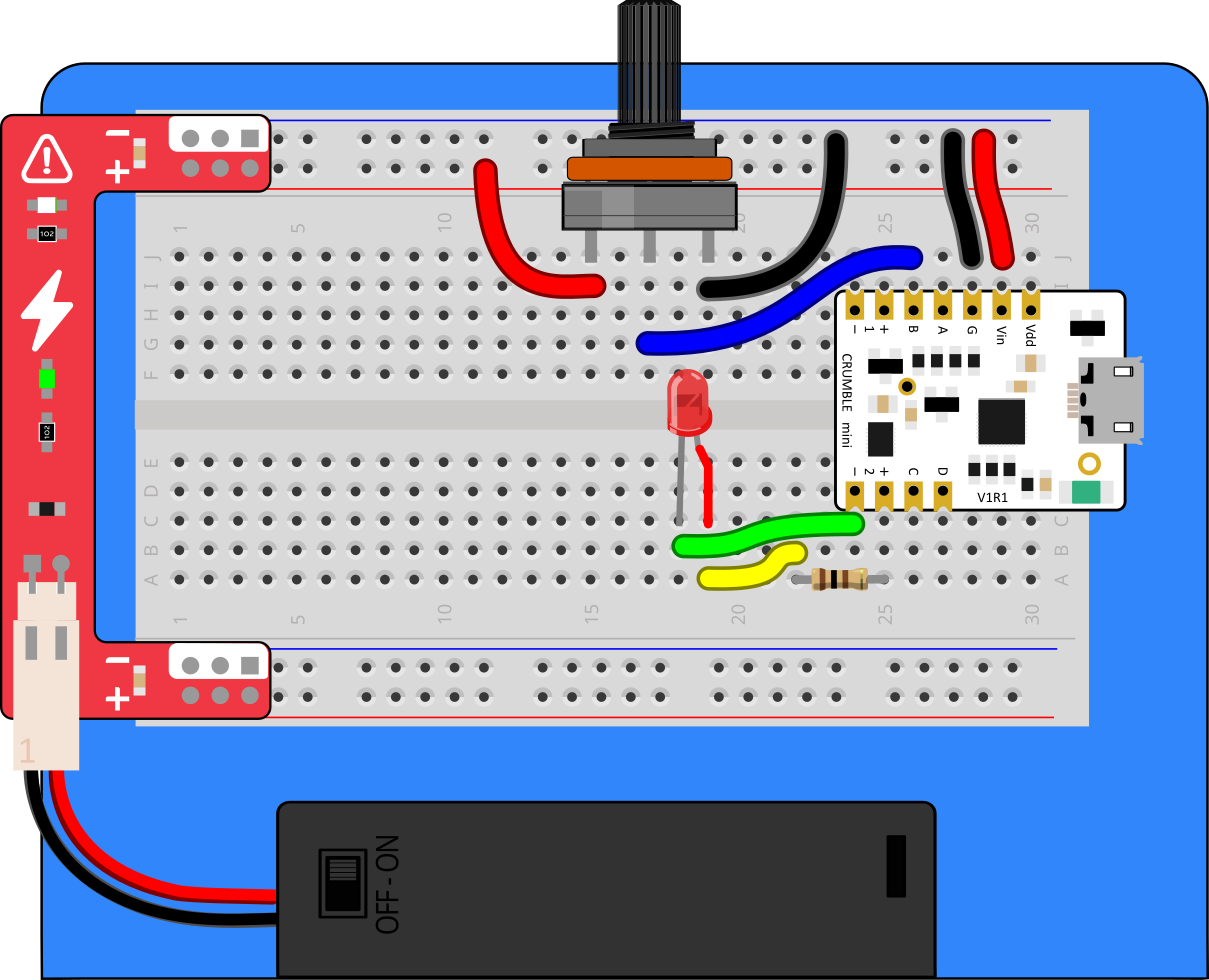
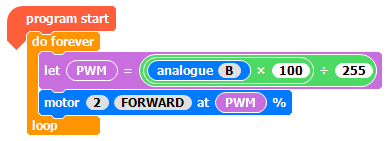
El programa es muy sencillo, siendo la parte más interesante el ajuste de rango que calculamos entre la lectura del potenciómetro (de 0 a 255) y la salida de control de potencia para el motor (de 0 a 255).
En este caso usamos una variable para calcular el porcentaje de PWM y para pasarlo al bloque de control del motor.
Comunidad
Participa en el Grupo de Robótica Educaativa con Crumble. Una gran comunidad donde poder compartir tus experiencias y aprender de las de otros usuarios.

Productos relacionados
")
- Controlador Crumble Mini (pines sin soldar)
- 15 €21.00% IVA incluido
")
- Controlador Crumble Mini (pines soldados)
- 16 €21.00% IVA incluido
")