

Home Crumble Crumbs cocodrilos

CRPROX
Crumb - Sensor de proximidad
Los crumbs son módulos compatibles con el controlador Crumble que se conectan mediante cables con pinzas de cocodrilos.
Este crumb incluye un sensor digital de proximidad por infrarrojos con una distancia de aproximadamente 10 centímetros.
¿Qué es un sensor de proximidad?
Un sensor de proximidad por infrarrojos es un dispositivo compuesto por un emisor de luz infrarroja y un receptor. Su funcionamiento consiste en emitir una luz infrarroja hacia delante del sensor. Si esta se encuentra con un obstáculo rebotará y volverá hacia el sensor. Cuando el sensor detecte esta luz infrarroja significará que hay un obstáculo delante. Si la luz emitida no encuentra ningún obstáculo no rebotará y, por lo tanto, el receptor no indicará la presencia de un objeto.
Es importante tener en cuenta que el obstáculo que se vaya a detectar debe encontrarse a una distancia de aproximadamente 10 centímetros. SIn embargo su color (los colores claros reflejan la luz mejor que los oscuros), su material (no es lo mismo un objeto que detectar la mano de una persona) y su forma (las superficies planas y perpendiculares al sensor facilitan que la luz infrarroja vuelva al receptor) pueden influir en cómo rebota la luz y hacer que el sensor no lo detecte. También es necesario tener en cuenta la posible influencia de otras emisiones de luz infrarroja como otros sensores o la luz solar.
Como sensor actúa como un sensor digital permitiendo que la corriente llegue al puerto al que esté conectado cuando detecta la presencia un obstáculo. Su funcionamiento es el mismo que el de un pulsador, es decir, tiene un estado estable y otro que solo ocurre cuando la luz que ha emitido vuelve porque ha chocado con un objeto.
Un crumb sensor de proximidad es un módulo diseñado para usar con Crumble (Crumb) compuesto por un sensor de proximidad por emisión de infrarrojos insertado en una placa impresa que facilita sus conexiones mediante cables de cocodrilo.
¿Cómo conectar un crumb sensor de proximidad?
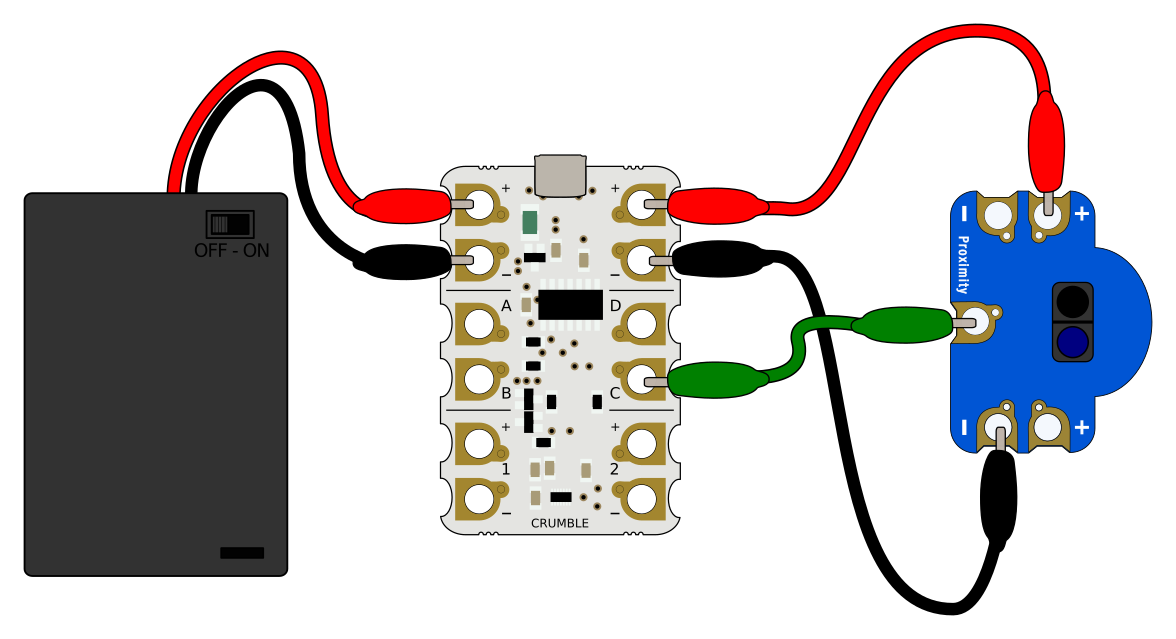
Para conectar este crumb solo es necesario conectar la alimentación positiva y negativa de Crumble a los pines con símbolos + y - y conectar el puerto en el que queramos leer el sensor (el puerto C en este caso) al pin central del crumb.
Los dos pines con el mismo símbolo tienen la misma función en el crumb. Esta ventaja nos permite conectar a los pines de alimentación positiva y negativa vacíos cables con los que alimentar otros crumbs.
¿Cómo programar la lectura de un sensor digital?
Crumble nos permite leer cualquier sensor digital utilizando el bloque de lectura digital. Con él comparamos los dos estados posibles con un sensor digital: HIGH (HI) o LOW (LO) dependiendo de si el circuito que conecta la alimentación positiva con el puerto está cerrado (HIGH) o abierto (LOW).
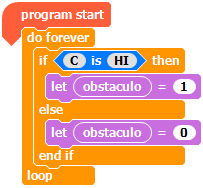
En este programa hemos definido que el valor de la variable "obstaculo" se modifique dependiendo de si el puerto C lee un estado alto (HIGH - obstaculo = 1) o bajo (LOW - obstaculo = 0). De esta forma podremos ver en el apartado Variables del software Crumble si el sensor detecta un objeto frente a él.
Recuerda activar el interruptor del portapilas cuando quieras leer un sensor digital.
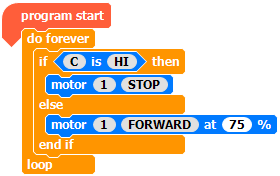
Si queremos que la lectura del sensor defina el estado de un actuador (por ejemplo, un motor) podemos introducir la comparación del estado del sensor digital en un bloque condicional. En este ejemplo modificamos el estado del motor 1 dependiendo de si leemos un valor alto o bajo en el puerto C.
Si cargamos este programa en un vehículo con un único motor conseguiremos que se detenga antes de chocar con un obstáculo. Al haber introducido el programa en un bucle infinito, cuando retiremos el obstáculo el vehículo continuará su camino.
Recuerda que puedes comprobar este programa observando el led que aparece en Crumble junto al puerto de conexión de motores 1 o conectar a él los dos cables de un motor de CC.
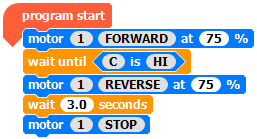
También puedes utilizar la lectura de un sensor digital para controlar el flujo de ejecución de un programa. En este ejemplo, el programa se quedará en suspensión hasta que el estado del puerto C sea alto (es decir, hasta que detecte un obstáculo). En ese momento se continuarán ejecutando sus bloques en orden.
Si cargamos este programa en un vehículo con un solo motor conseguiremos que avance hasta detectar un obstáculo. En ese momento retrocederá durante tres segundos y después se detendrá.
Puedes utilizar el bloque "wait until" cuando quieras que el programa fluya utilizando el estado del sensor.
Descargas
Productos relacionados

- Crumble Cocodrilos 1 - Luces y movimiento
- 5,50 €4.00% IVA incluido

- Crumble cocodrilos 2 Sensores digitales y funciones lógicas
- 5,50 €4.00% IVA incluido

- Crumble cocodrilos 3 Sensores analógicos, variables y operaciones matemáticas
- 5,50 €4.00% IVA incluido

- Kit expansión Crumble Cocodrilos
- 78,65 €21.00% IVA incluido

- Crumb - Sensor PIR
- 9,20 €21.00% IVA incluido

