Contenido del kit
Este kit incluye los siguientes materiales: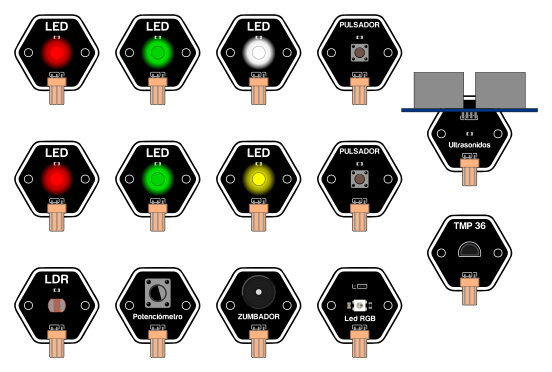
- 1 - Placa Compluino UNO
- 1 - Cable USB A – B.
- 1 - Chasis de madera + Tornillería + Separadores M3.
- 1 - Destornillador PH1.
- 2 - Módulo led rojo con conector Molex.
- 2 - Módulo led verde con conector Molex.
- 1 - Módulo led amarillo con conector Molex.
- 1 - Módulo led blanco con conector Molex.
- 2 - Módulo pulsador con conector Molex.
- 1 - Módulo LDR con conector Molex.
- 1 - Módulo potenciómetro con conector Molex.
- 1 - Módulo zumbador con conector Molex.
- 1 - Módulo TMP 36 con conector Molex.
- 1 - Módulo RGB Neopixel con protección y conector Molex.
- 1 - Módulo HC-SR04, en configuración “un hilo” y conector Molex.
- 7 - Cables de conexión Molex-Header trenzados.
Montaje del chasis
Ejemplos y actividades
Ejemplo 1: Parpadeo de dos ledes rojos cada 2000 milisegundos
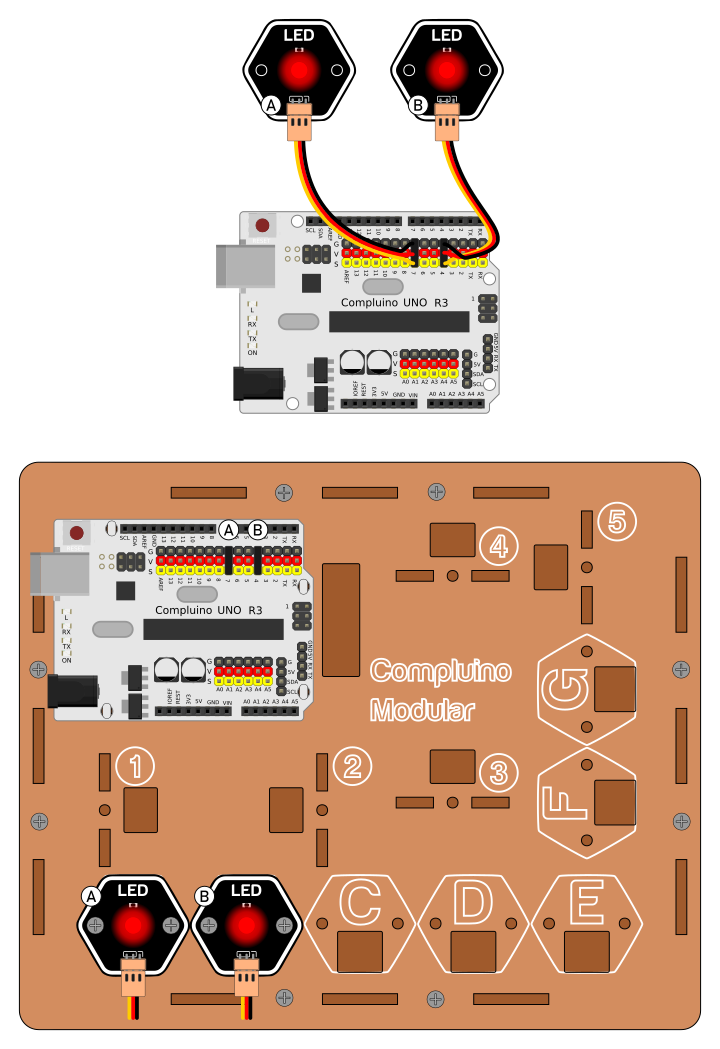
// Ejemplo 1: parpadeo de dos ledes rojos.
#define LEDA 7
#define LEDB 4
void setup()
{
pinMode(LEDA, OUTPUT); // Definir el pin 7 como salida.
pinMode(LEDB, OUTPUT); // Definir el pin 4 como salida.
}
void loop()
{
digitalWrite (LEDA, HIGH); // Encender el led A
digitalWrite (LEDB, HIGH); // Encender el led B
delay (2000); // Esperar dos segundos
digitalWrite (LEDA, LOW); // Apagar el led A
digitalWrite (LEDB, LOW); // Apagar el led B
delay (2000); // Esperar dos segundos
}
Ejemplo 2: iluminación secuencial de cinco ledes
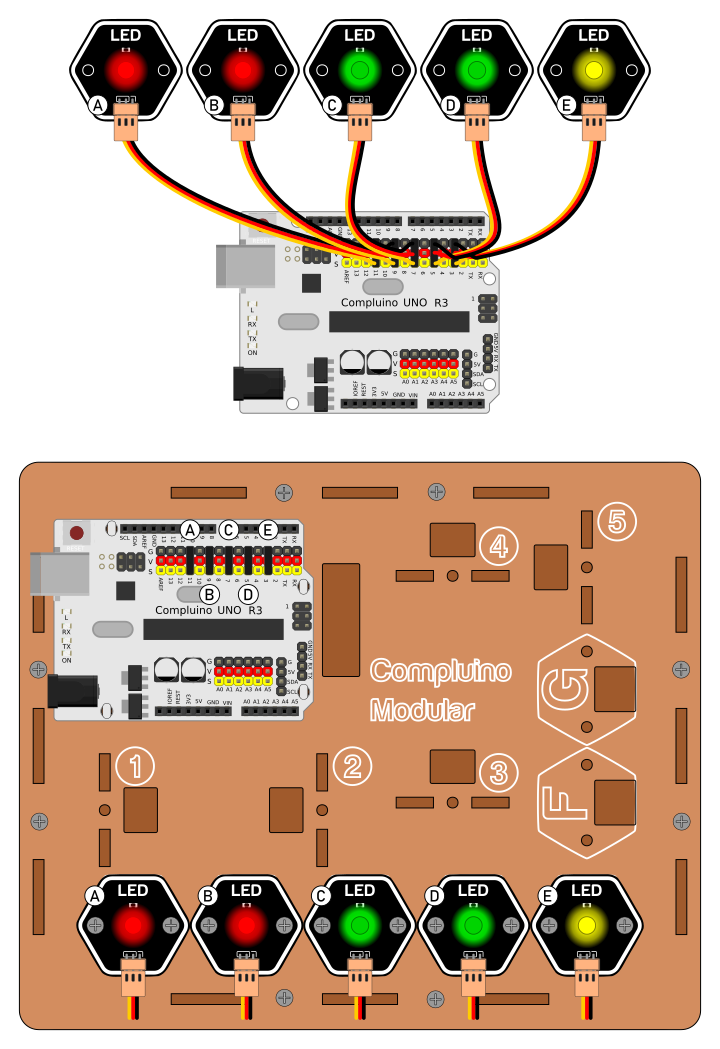
// Ejemplo 2: iluminación secuencial de cinco ledes.
#define LEDA 11
#define LEDB 9
#define LEDC 7
#define LEDD 5
#define LEDE 3
#define TIEMPO 125
void setup()
{
pinMode(LEDA, OUTPUT); // Definir el pin 11 como salida
pinMode(LEDB, OUTPUT); // Definir el pin 9 como salida
pinMode(LEDC, OUTPUT); // Definir el pin 7 como salida
pinMode(LEDD, OUTPUT); // Definir el pin 5 como salida
pinMode(LEDE, OUTPUT); // Definir el pin 3 como salida
}
void loop()
{
digitalWrite (LEDA, HIGH); // Encender el led A
delay (TIEMPO); // Esperar 0.125 segundos
digitalWrite (LEDA, LOW); // Apagar el led A
digitalWrite (LEDB, HIGH); // Encender el led B
delay (TIEMPO); // Esperar 0.125 segundos
digitalWrite (LEDB, LOW); // Apagar el led B
digitalWrite (LEDC, HIGH); // Encender el led C
delay (TIEMPO); // Esperar 0.125 segundos
digitalWrite (LEDC, LOW); // Apagar el led C
digitalWrite (LEDD, HIGH); // Encender el led D
delay (TIEMPO); // Esperar 0.125 segundos
digitalWrite (LEDD, LOW); // Apagar el led D
digitalWrite (LEDE, HIGH); // Encender el led E
delay (TIEMPO); // Esperar 0.125 segundos
digitalWrite (LEDE, LOW); // Apagar el led E
}
Ejemplo 3: Encender o apagar un led dependiendo del estado de un pulsador
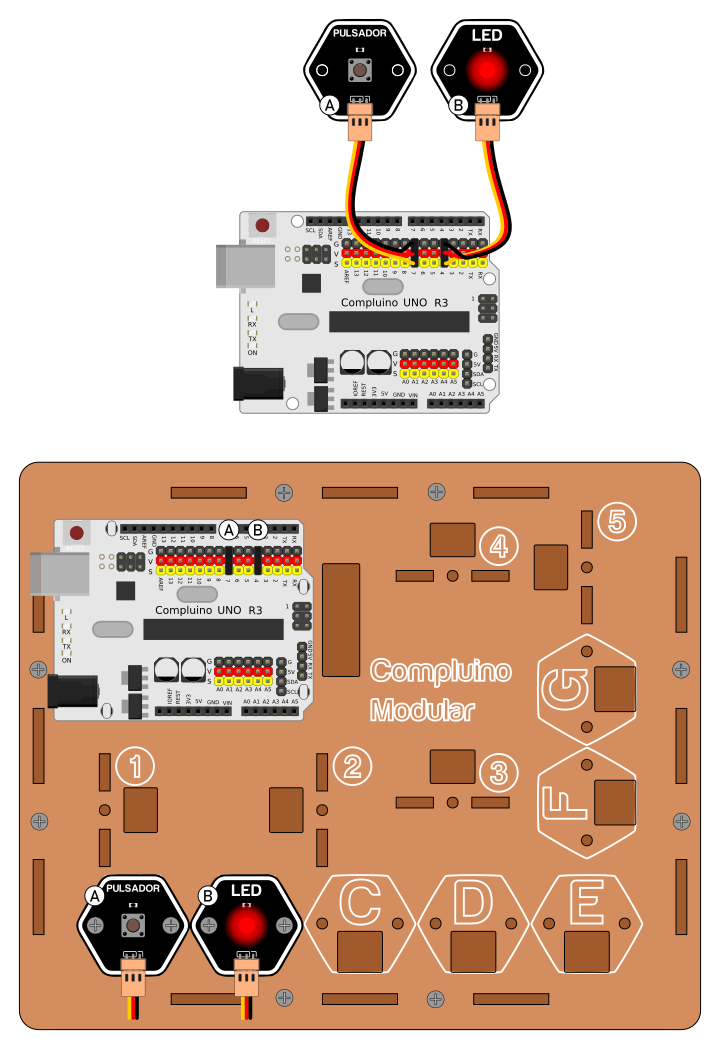
// Ejemplo 3: encender o apagar un led dependiendo del estado de un pulsador.
#define LED 4
#define PULSADOR 7
void setup()
{
pinMode(LED, OUTPUT); // Definir el pin 4 como salida
pinMode(PULSADOR, INPUT); // Definir el pin 7 como entrada
}
void loop()
{
if (digitalRead(PULSADOR)==HIGH) //Comparar el estado que se lee en el pin del pulsador
{
digitalWrite(LED,HIGH); // Si se cumple la condición enciende el led
}
else
{
digitalWrite(LED,LOW); // Si no se cumple la condición apaga el led
}
}
Ejemplo 4: Semáforo para peatones y vehículos con pulsador
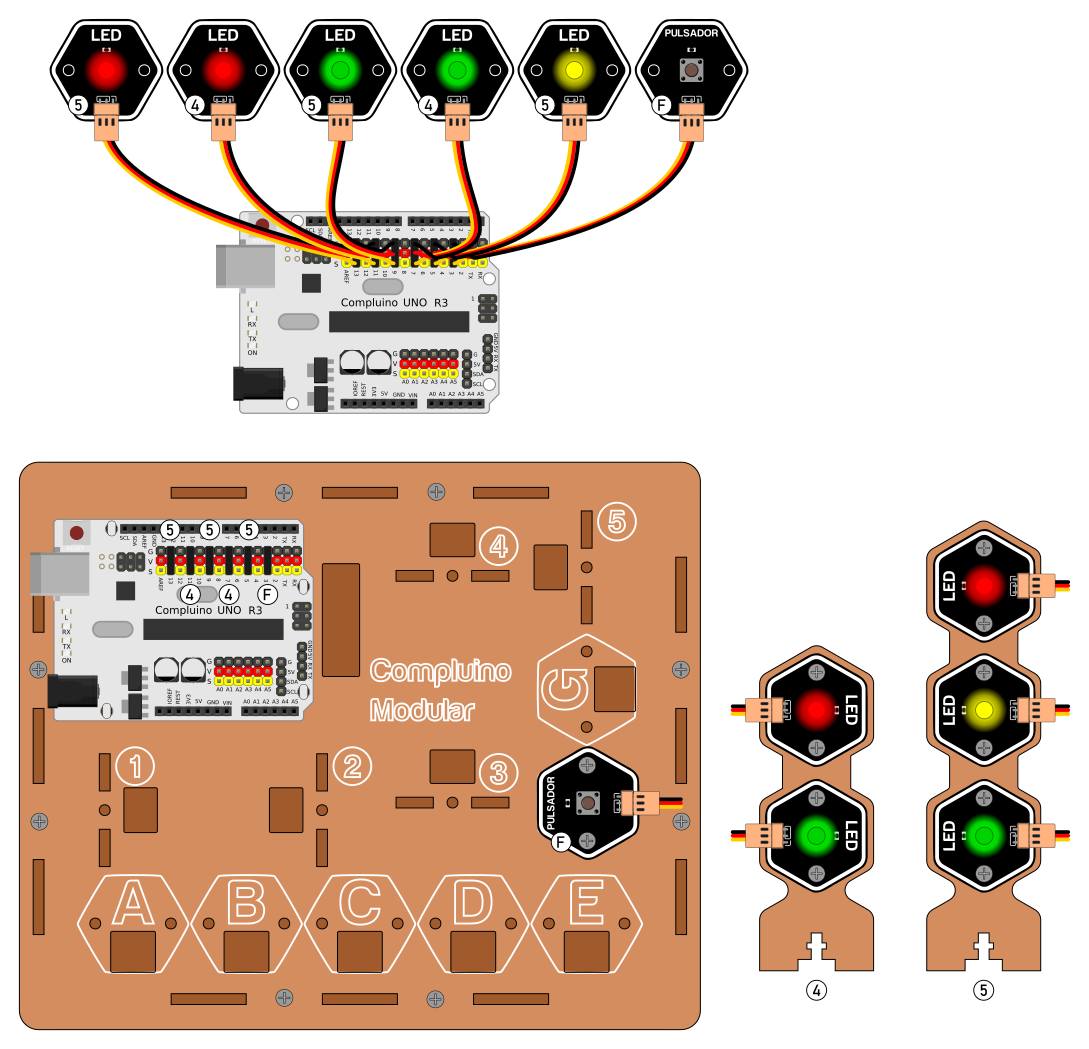
// Ejemplo 4: Semáforo peatones y vehículos con pulsador
#define C_ROJO 13
#define C_AMBAR 5
#define C_VERDE 9
#define P_ROJO 11
#define P_VERDE 7
#define PULSADOR 3
void setup()
{
pinMode(C_ROJO, OUTPUT); // Definir el pin 13 como salida
pinMode(C_AMBAR, OUTPUT); // Definir el pin 5 como salida
pinMode(C_VERDE, OUTPUT); // Definir el pin 9 como salida
pinMode(P_ROJO, OUTPUT); // Definir el pin 11 como salida
pinMode(P_VERDE, OUTPUT); // Definir el pin 7 como salida
pinMode(PULSADOR, INPUT); // Definir el pin 3 como entrada
}
void loop()
{
digitalWrite(P_ROJO, HIGH); // Vehículos circulan y los peatones esperan en rojo hasta que se pulse
digitalWrite(C_VERDE, HIGH);
while (digitalRead(PULSADOR) == LOW);
delay(1000);
digitalWrite (C_VERDE, LOW); //Vehículos en ámbar
digitalWrite(C_AMBAR, HIGH);
delay(1000);
digitalWrite (C_AMBAR, LOW); //Vehículos en rojo
digitalWrite(C_ROJO, HIGH);
delay(500);
digitalWrite (P_VERDE, HIGH); //Peatones en verde mientras los vehículos esperan en rojo
delay(2000);
for (int x = 0; x < 5; x++) //Parpadea el semáforo verde de los peatones cinco veces
{
digitalWrite(P_VERDE, HIGH);
delay(250);
digitalWrite(P_VERDE, LOW);
delay(250);
}
digitalWrite(P_ROJO, HIGH); //Ambos semáforos en rojo para no atropellar a los peatones lentos
delay(500);
}
Ejemplo 5: Encender el led verde o el rojo dependiendo de si el valor del potenciómetro es menor o mayor de 512
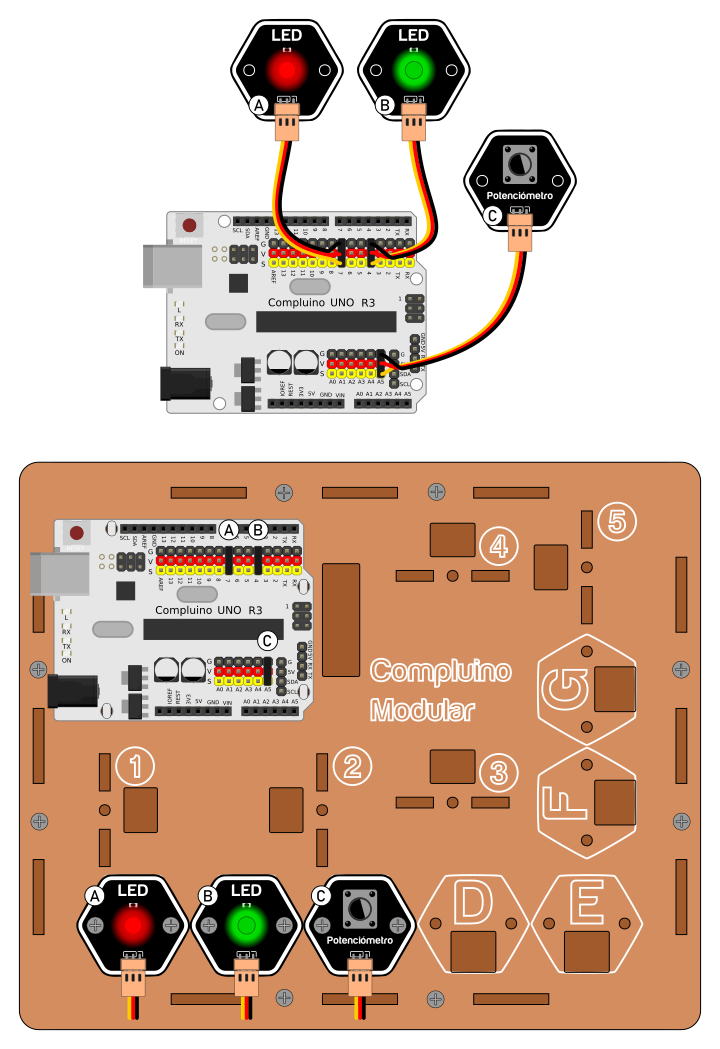
// Ejemplo 5: encender el led verde o el rojo dependiendo de si el valor del potenciómetro es menor o mayor de 512
#define POT A5
#define LEDA 7
#define LEDB 4
int lectura_pot = 0;
void setup()
{
pinMode(LEDA, OUTPUT); // Definir el pin 7 como salida
pinMode(LEDB, OUTPUT); // Definir el pin 4 como salida
}
void loop()
{
lectura_pot = analogRead(POT); //Guardar el valor leido en el pin A5 en una variable
if (lectura_pot >= 512) // Comparar la lectura del potenciómetro con un valor de corte
{
digitalWrite(LEDA, HIGH);
digitalWrite(LEDB, LOW);
}
else
{
digitalWrite(LEDB, HIGH);
digitalWrite(LEDA, LOW);
}
}
Ejemplo 6: controlar el brillo de un led con la LDR
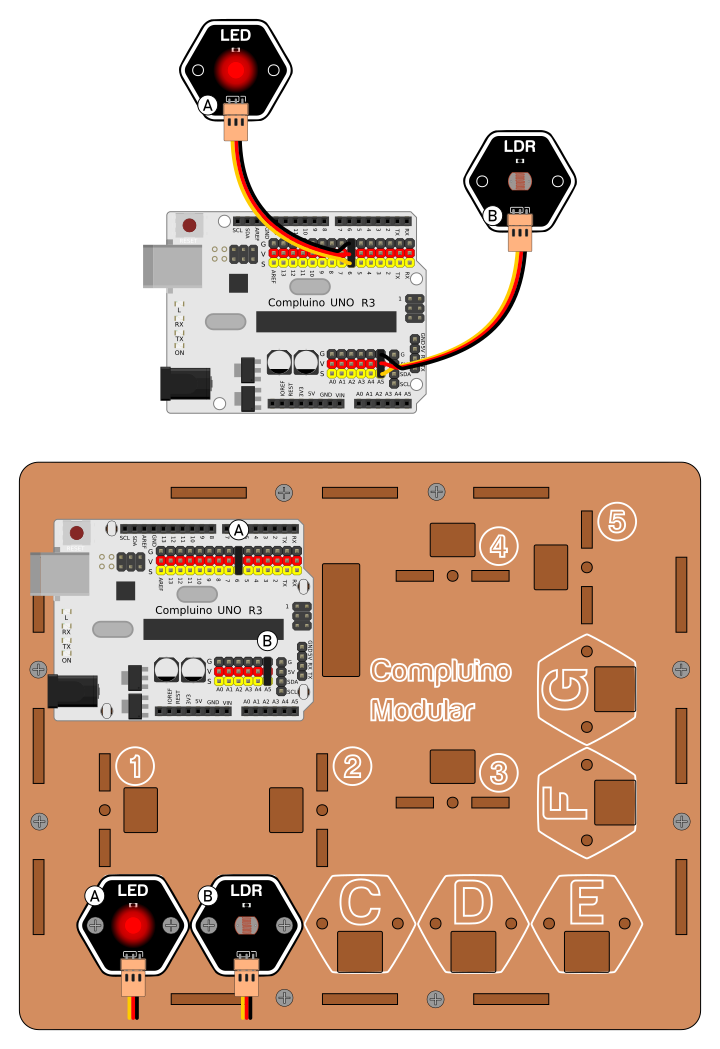
// Ejemplo 6: controlar el brillo de un led con la LDR.
#define LDR A5
#define LED 6
int lectura_ldr = 0;
int brillo = 0;
void setup()
{
pinMode(LED, OUTPUT);
}
void loop()
{
lectura_ldr = analogRead(LDR); //Guardar el valor leido en el pin A5 en una variable
brillo = map(lectura_ldr, 0, 1023, 0, 255); //Convertir el valor a un rango de 0 a 255
analogWrite(LED, brillo);
}
Ejemplo 7: dos pulsadores activan tonos diferentes en el zumbador
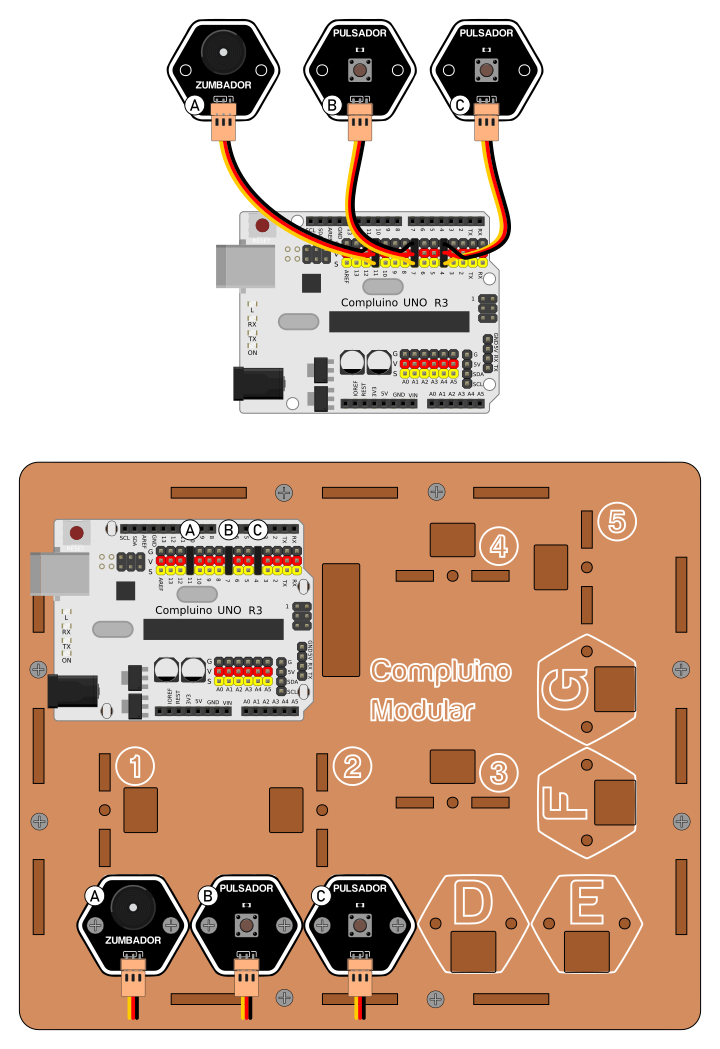
// Ejemplo 7: dos pulsadores activan tonos diferentes en el zumbador
#define PULSADORB 7
#define PULSADORC 4
#define ZUMBADOR 11
void setup()
{
pinMode(PULSADORB, INPUT);
pinMode(PULSADORC, INPUT);
pinMode(ZUMBADOR, OUTPUT);
tone(ZUMBADOR, 293); //Nota RE
delay(200);
tone(ZUMBADOR, 440); //Nota LA
delay(200);
noTone(ZUMBADOR);
}
void loop()
{
if (digitalRead(PULSADORB) == HIGH)
{
tone(ZUMBADOR, 659); //Nota MI
}
else
{
if (digitalRead(PULSADORC) == HIGH)
{
tone(ZUMBADOR, 392); //Nota SOL
}
else
{
noTone(ZUMBADOR);
}
}
}
Ejemplo 8: medir la temperatura y mostrarla en el monitor serie
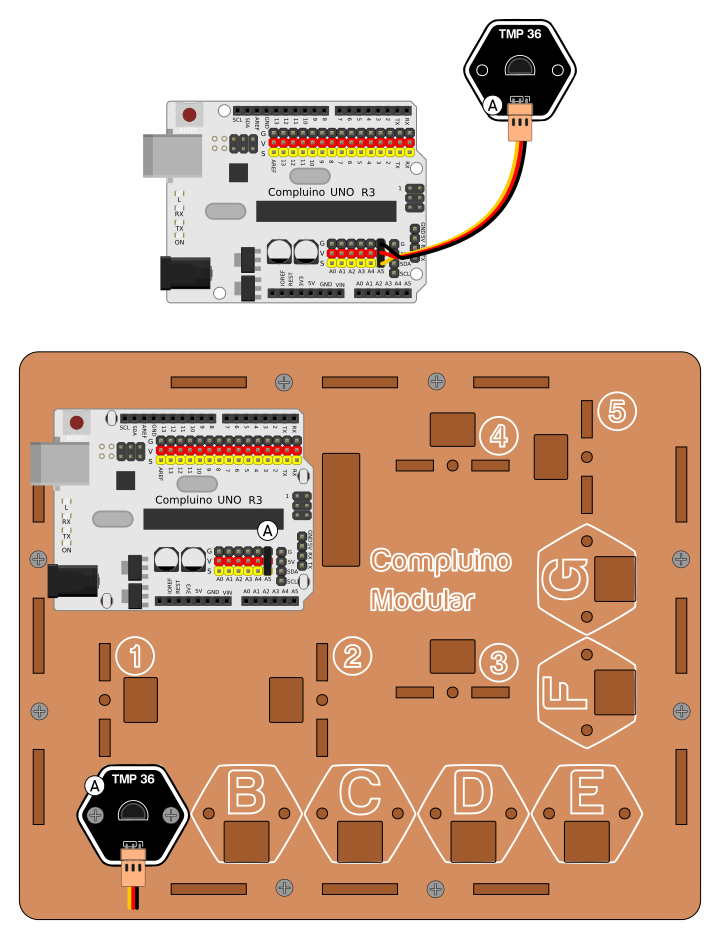
// Ejemplo 8: medir temperatura y mostrarla en el monitor serie
#define TEMP A5
float temperatura = 0, medida_sensor = 0, voltaje = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
medida_sensor = analogRead(TEMP); //Actualizamos el valor del sensor de temperatura
voltaje = medida_sensor * 5 / 1024; //convierte cuentas a voltios
temperatura = (voltaje * 100) - 50; //convierte de voltios a grados Cº
Serial.print("La temperatura actual es: ");
Serial.print(temperatura);
Serial.println(" grados");
delay(500);
}
Ejemplo 9: secuencia de ocho colores con el led RGB y la librería Neopixel
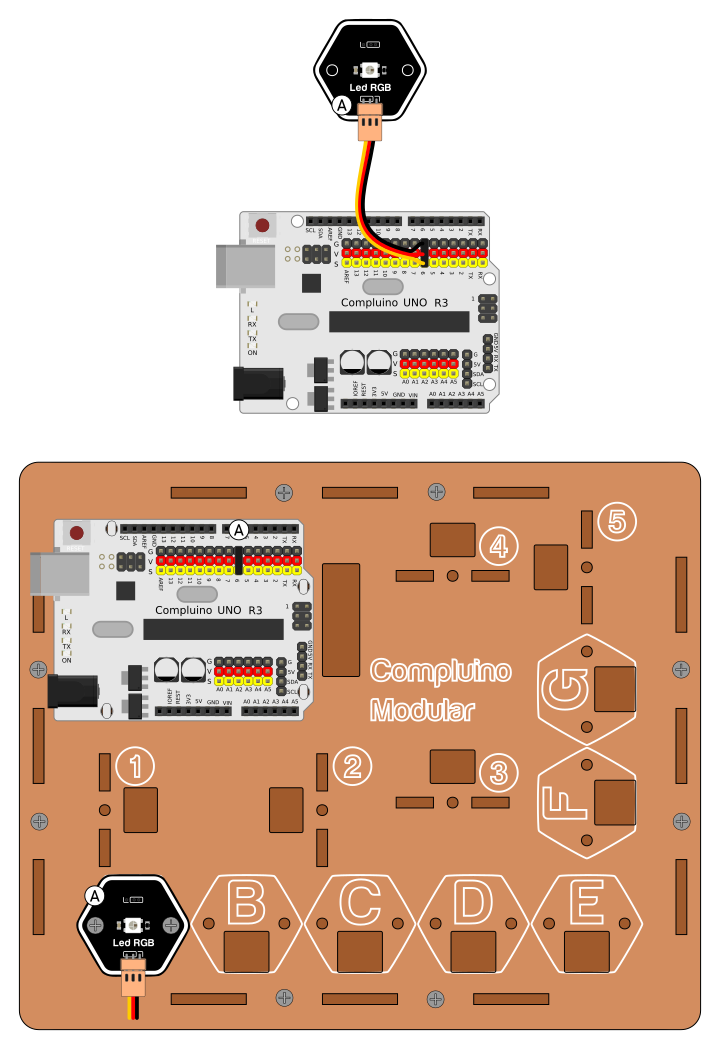
// Ejemplo 9: 8 colores con el led RGB y la librería de Neopixel
#include <Adafruit_NeoPixel.h>
#define PIN_RGB 6 //Pin del rgb
Adafruit_NeoPixel rgb(1, PIN_RGB, NEO_GRB + NEO_KHZ400); //Configura 1 pixel RGB
void setup()
{
rgb.begin();
}
void loop()
{
rgb.setPixelColor(0, rgb.Color(255, 0, 0)); //Muestra el color rojo
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(0, 255, 0)); //Muestra el color verde
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(0, 0, 255)); //Muestra el color azul
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(255, 255, 0)); //Muestra el color amarillo
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(255, 0, 255)); //Muestra el color magenta
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(0, 255, 255)); //Muestra el color cian
rgb.show();
delay(2000);
rgb.setPixelColor(0, rgb.Color(255, 255, 255)); //Muestra el color blanco
rgb.show();
delay(2000);
rgb.clear(); //Apaga el RGB
rgb.show();
delay(2000);
}
Ejemplo 10: medir distancia con el sensor ultrasónico y utilizarlas para modificar el sonido del zombador
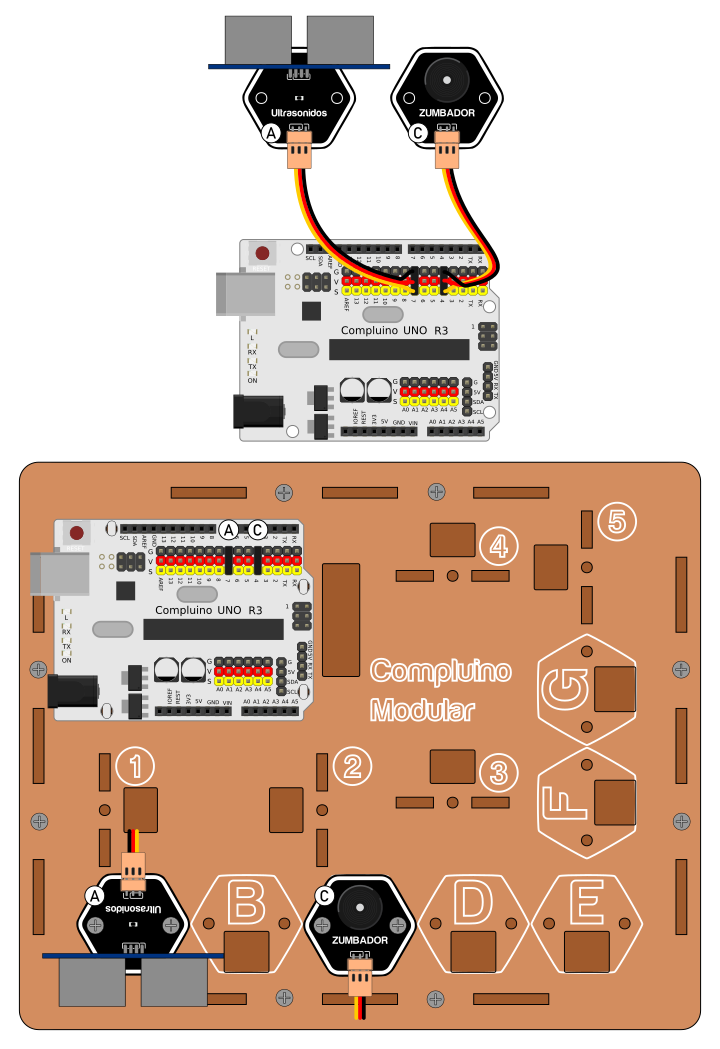
// Ejemplo 10: medir distancia con el HC SR04 y variar la frecuencia de pitido de un zumbador
#define PIN_US 7 //Pin del ultrasonido
#define ZUMBADOR 4 //Pin del zumbador
float tiempo; //Variable para guardar el tiempo
float distancia; //Variable para guardar la distancia
void setup()
{
pinMode(ZUMBADOR,OUTPUT); //Configuramos el zumbador como salida
}
void loop()
{
pinMode(PIN_US,OUTPUT); //Configuramos el pin como salida
digitalWrite(PIN_US,LOW);
delayMicroseconds(5);
digitalWrite(PIN_US,HIGH); //Emitimos un echo por el ultrasonidos
delayMicroseconds(10);
digitalWrite(PIN_US,LOW);
//Medimos el tiempo que tarda el sonido en ir y volver
pinMode(PIN_US,INPUT); //Cambiamos el pin a entrada
tiempo = pulseIn(PIN_US,HIGH);
//Calculamos la distancia en cm
distancia = tiempo/58;
//Cambiamos la frecuencia del pitido en funcion de la distancia
tone(ZUMBADOR,440);
delay(map(distancia,0,255,50,1000)); //La espera va desde los 50 ms a 1s
noTone(ZUMBADOR);
delay(map(distancia,0,255,50,1000));
}





