

MB-US
MiiBot - Ultrasonic sensor
Sensor de distancia por ultrasonidos para MiiBot y Crumble Junior
¿Qué es un sensor de distancia por ultrasonidos?
Es un tipo de sensor que mide la distancia a la que se encuentran las cosas usando el tiempo que tarda el sonido en ir y volver a un objeto. En nuestro caso este sensor tiene una resolución de un cm y un rango de medida máximo de 200cm. La medida mínima que puede realizar está en torno a los 4cm.
¿Cómo conectarlo?
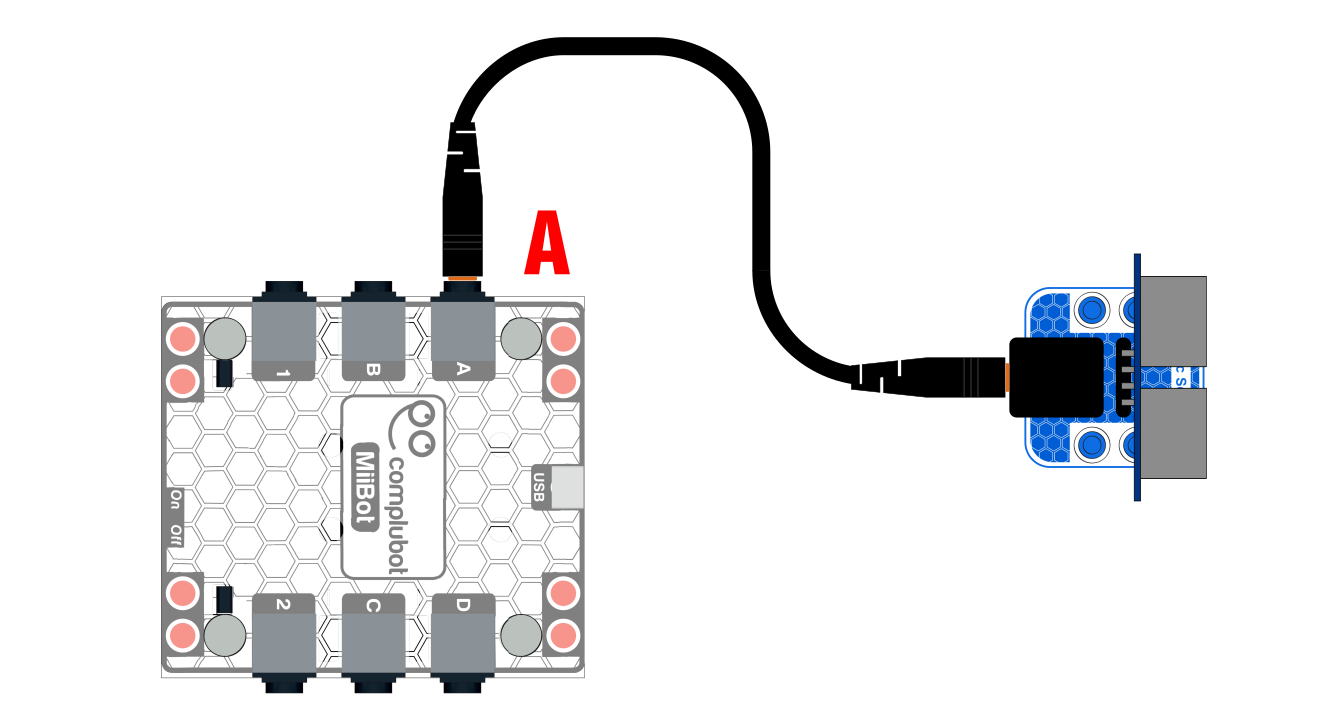
Este sensor de distancia es compatible con MiiBot y CrumbleJunior, para conectarlo necesitamos un cable de conexión tipo mini-jack, como los que se usan en esos kits. Podemos conectar el sensor a cualquiera de los puertos A, B, C o D del controlador.
¿Cómo se programa?
En la paleta Inpunt/Output del software de Crumble tenemos el bloque para poder realizar medidas directas de la distancia en centímetros, solo hay que configurar las señales de emisión (T) y recepción (R) del sensor ambas en la misma entrada en la que esté conectado.

El resultado de esta medida la podemos meter en una variable.

También podemos usarla como parámetro de un operador para, por ejemplo, tomar una decisión.

Ejemplo 1 - Medidor de distancias por ultrasonidos
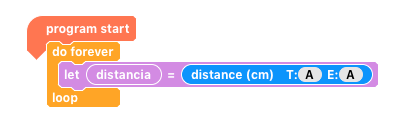
Con un programa tan sencillo como un bloque y una estructura de repetición podemos construir un sistema de medida de distancias con este sensor.
Solo tenemos que conectar el sensor al puerto A de una controladora MiiBot o CrumbleJunior para poder visualizar las medidas de la distancia en la pantalla del ordenador (paleta variables del programa Crumble). Esta comunicación se realiza mediante la conexión USB, así que el cable USB tiene que estar conectado en todo momento entre el ordenador y la controladora.
Ejemplo 2 - Alarma con medidor de distancias por ultrasonidos
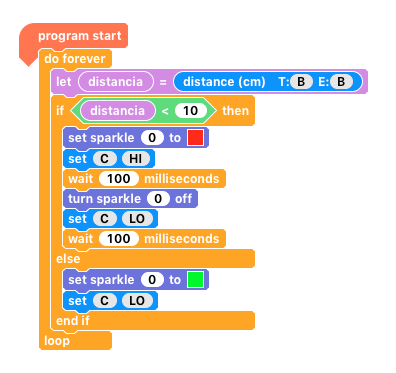
En este ejemplo usamos el sensor de distancias por ultrasonidos como un sensor de presencia que se activa cuando detecta un "intruso" a una distancia menor que la especificada en el programa (10cm).
En este ejemplo hemos usado una controladora Crumble Junior a la que hemos conectado:
Puerto B: MiiBot - Sensor de distancia por ultrasonidos
Puerto C: Crumble Junior - Zumbador
Puerto D: Crumble Junior - Sparkle
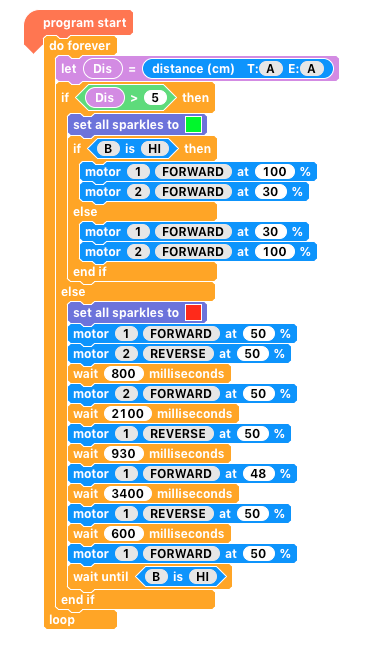
A continuación se muestra un ejemplo de programa en el que podemos ver dos partes:
- Si la medida del sensor de distancia es mayor o igual a 10cm, ejecuta un siguelíneas
- Si la medida del sensor de distancia es menor que 10cm, ejecuta un movimiento para esquivar el obstáculo
Los tiempos de los movimientos para esquivar el obstáculo hay que ajustarlos en función del tamaño de cada obstáculo.
Ejemplo 3 - robot siguelíneas que esquiva obstáculos
En el siguiente ejemplo complementamos el robot MiiBot con este sensor de distancias para detectar y esquivar los obstáculos que se encuentre en su camino.
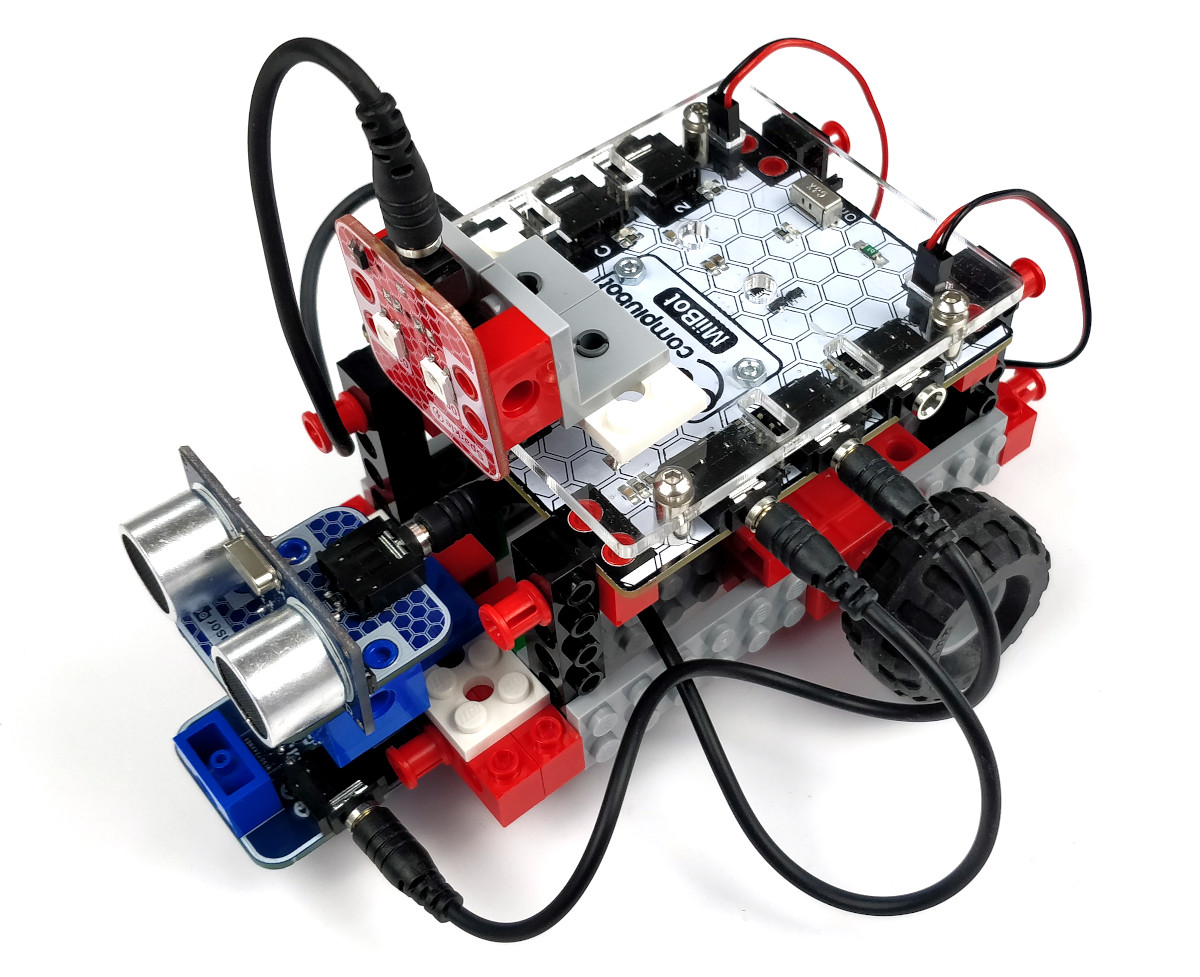
En la controladora MiiBot hemos realizado las siguientes conexiones:
Puerto A : MiiBot - Ultrasonic sensor
Puerto B: MiiBot - Light sensor
Puerto D: MiiBot - Sparkles
Ejemplo 4 - Seguimiento de posición mediante control proporcional
En este ejemplo vamos a ver como usar la información del sensor de distancia por ultrasonidos para mantener constante la distancia de un robot MiiBot respecto de un obstáculo. Para ello usaremos un algoritmo de control proporcional.
La idea es pues controlar la velocidad del robot (velocidad) , de manera que esta sea cero cuando el obstáculo esté a la distancia deseada y que sea positiva o negativa en función de la posición relativa del robot respecto del obstáculo.
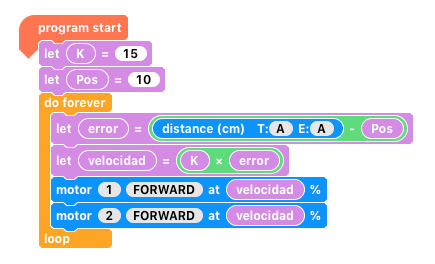
Para ello aplicamos un algoritmo de control proporcional, de forma que calculamos el error (error) como la diferencia entre la posición actual y la que debería estar (Pos).
error = distancia medida - Pos
Para calcular la velocidad del robot solo tenemos que multiplicar el error por una constante (K). El valor de esta constante se obtiene de forma experimental, de tal manera que cuanto mayor sea más rápida será la velocidad de reacción del robot.
velocidad = error x K
Así quedaría el programa para Crumble
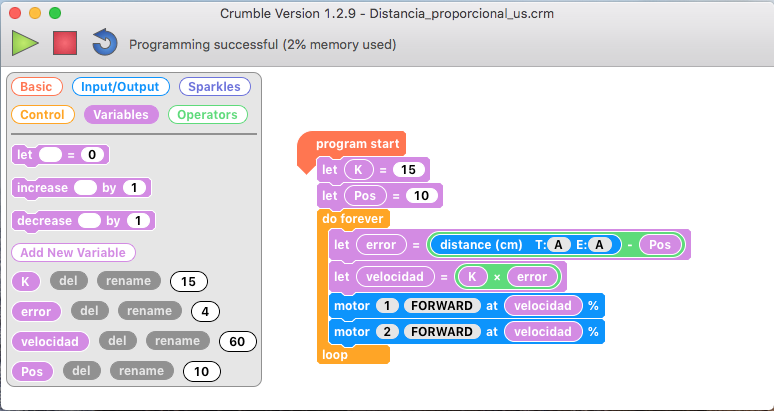
Una característica muy interesante del entorno de programación Crumble es que mientras el programa está funcionando si mantenemos el cable USB conectado entre el ordenador y la placa controladora, podemos monitorizar el estado de las variables, sin neccesidad de añadir código adicional, tal y como se muestra en la siguiente imagen
Características técnicas del sensor:
- Distancia máxima 200cm
- Zona muerta (medida mínima) < 4cm
- Resolución 1cm
- Usa un único pin del controlador para funcionar
- Manejo con un solo bloque de programa
- Lectura directa de la distancia en cm
- Conexión mediante jack de 3,5mm
- Compatible MiiBot y CrumbleJunior
¿Qué es un sensor de distancia por ultrasonidos?
Es un tipo de sensor que mide la distancia a la que se encuentran las cosas usando el tiempo que tarda el sonido en ir y volver a un objeto. En nuestro caso este sensor tiene una resolución de un cm y un rango de medida máximo de 200cm. La medida mínima que puede realizar está en torno a los 4cm.
¿Cómo conectarlo?
Este sensor de distancia es compatible con MiiBot y CrumbleJunior, para conectarlo necesitamos un cable de conexión tipo mini-jack, como los que se usan en esos kits. Podemos conectar el sensor a cualquiera de los puertos A, B, C o D del controlador.
¿Cómo se programa?
En la paleta Inpunt/Output del software de Crumble tenemos el bloque para poder realizar medidas directas de la distancia en centímetros, solo hay que configurar las señales de emisión (T) y recepción (R) del sensor ambas en la misma entrada en la que esté conectado.
El resultado de esta medida la podemos meter en una variable.
También podemos usarla como parámetro de un operador para, por ejemplo, tomar una decisión.
Ejemplo 1 - Medidor de distancias por ultrasonidos
Con un programa tan sencillo como un bloque y una estructura de repetición podemos construir un sistema de medida de distancias con este sensor.
Solo tenemos que conectar el sensor al puerto A de una controladora MiiBot o CrumbleJunior para poder visualizar las medidas de la distancia en la pantalla del ordenador (paleta variables del programa Crumble). Esta comunicación se realiza mediante la conexión USB, así que el cable USB tiene que estar conectado en todo momento entre el ordenador y la controladora.
Ejemplo 2 - Alarma con medidor de distancias por ultrasonidos
En este ejemplo usamos el sensor de distancias por ultrasonidos como un sensor de presencia que se activa cuando detecta un "intruso" a una distancia menor que la especificada en el programa (10cm).
En este ejemplo hemos usado una controladora Crumble Junior a la que hemos conectado:
Puerto B: MiiBot - Sensor de distancia por ultrasonidos
Puerto C: Crumble Junior - Zumbador
Puerto D: Crumble Junior - Sparkle
A continuación se muestra un ejemplo de programa en el que podemos ver dos partes:
- Si la medida del sensor de distancia es mayor o igual a 10cm, ejecuta un siguelíneas
- Si la medida del sensor de distancia es menor que 10cm, ejecuta un movimiento para esquivar el obstáculo
Los tiempos de los movimientos para esquivar el obstáculo hay que ajustarlos en función del tamaño de cada obstáculo.
Ejemplo 3 - robot siguelíneas que esquiva obstáculos
En el siguiente ejemplo complementamos el robot MiiBot con este sensor de distancias para detectar y esquivar los obstáculos que se encuentre en su camino.
En la controladora MiiBot hemos realizado las siguientes conexiones:
Puerto A : MiiBot - Ultrasonic sensor
Puerto B: MiiBot - Light sensor
Puerto D: MiiBot - Sparkles
Ejemplo 4 - Seguimiento de posición mediante control proporcional
En este ejemplo vamos a ver como usar la información del sensor de distancia por ultrasonidos para mantener constante la distancia de un robot MiiBot respecto de un obstáculo. Para ello usaremos un algoritmo de control proporcional.
La idea es pues controlar la velocidad del robot (velocidad) , de manera que esta sea cero cuando el obstáculo esté a la distancia deseada y que sea positiva o negativa en función de la posición relativa del robot respecto del obstáculo.
Para ello aplicamos un algoritmo de control proporcional, de forma que calculamos el error (error) como la diferencia entre la posición actual y la que debería estar (Pos).
error = distancia medida - Pos
Para calcular la velocidad del robot solo tenemos que multiplicar el error por una constante (K). El valor de esta constante se obtiene de forma experimental, de tal manera que cuanto mayor sea más rápida será la velocidad de reacción del robot.
velocidad = error x K
Así quedaría el programa para Crumble
Una característica muy interesante del entorno de programación Crumble es que mientras el programa está funcionando si mantenemos el cable USB conectado entre el ordenador y la placa controladora, podemos monitorizar el estado de las variables, sin neccesidad de añadir código adicional, tal y como se muestra en la siguiente imagen
Características técnicas del sensor:
- Distancia máxima 200cm
- Zona muerta (medida mínima) < 4cm
- Resolución 1cm
- Usa un único pin del controlador para funcionar
- Manejo con un solo bloque de programa
- Lectura directa de la distancia en cm
- Conexión mediante jack de 3,5mm
- Compatible MiiBot y CrumbleJunior
- Etapa educativa
- Plataforma
Productos relacionados
- EN STOCK (11)
 oferta
oferta - Robot Primaria MiiBot
- Antes 135€ 118 €21.00% IVA incluido

Accesorios
- EN STOCK (11)oferta
- Robot Primaria MiiBot
- Antes 135€ 118 €21.00% IVA incluido